
.gif)
Rover (space exploration)
Encyclopedia

Space exploration
Space exploration is the use of space technology to explore outer space. Physical exploration of space is conducted both by human spaceflights and by robotic spacecraft....
vehicle designed to move across the surface of a planet
Planet
A planet is a celestial body orbiting a star or stellar remnant that is massive enough to be rounded by its own gravity, is not massive enough to cause thermonuclear fusion, and has cleared its neighbouring region of planetesimals.The term planet is ancient, with ties to history, science,...
or other astronomical body. Some rovers have been designed to transport members of a human spaceflight
Human spaceflight
Human spaceflight is spaceflight with humans on the spacecraft. When a spacecraft is manned, it can be piloted directly, as opposed to machine or robotic space probes and remotely-controlled satellites....
crew; others have been partially or fully autonomous robot
Autonomous robot
Autonomous robots are robots that can perform desired tasks in unstructured environments without continuous human guidance. Many kinds of robots have some degree of autonomy. Different robots can be autonomous in different ways...
s. Rovers usually arrive at the planetary surface on a lander
Lander (spacecraft)
A lander is a spacecraft which descends toward and comes to rest on the surface of an astronomical body. For bodies with atmospheres, the landing is called atmospheric reentry and the lander descends as a re-entry vehicle...
-style spacecraft
Spacecraft
A spacecraft or spaceship is a craft or machine designed for spaceflight. Spacecraft are used for a variety of purposes, including communications, earth observation, meteorology, navigation, planetary exploration and transportation of humans and cargo....
.
Comparison with space probes of other types
Rovers have several advantages over stationary landersLander (spacecraft)
A lander is a spacecraft which descends toward and comes to rest on the surface of an astronomical body. For bodies with atmospheres, the landing is called atmospheric reentry and the lander descends as a re-entry vehicle...
: they examine more territory, they can be directed to interesting features, they can place themselves in sunny positions to weather winter months if they are solar powered and they can advance the knowledge of how to perform very remote robot
Robot
A robot is a mechanical or virtual intelligent agent that can perform tasks automatically or with guidance, typically by remote control. In practice a robot is usually an electro-mechanical machine that is guided by computer and electronic programming. Robots can be autonomous, semi-autonomous or...
ic vehicle control which is necessarily semi-autonomous due to the finite speed of light.
Their advantages over orbiting spacecraft
Orbiter
An orbiter is a space probe that orbits a planet.-Asteroids:*NEAR Shoemaker...
are that they can make observations to a microscopic
Microscopic
The microscopic scale is the scale of size or length used to describe objects smaller than those that can easily be seen by the naked eye and which require a lens or microscope to see them clearly.-History:...
level and can conduct physical experiment
Experiment
An experiment is a methodical procedure carried out with the goal of verifying, falsifying, or establishing the validity of a hypothesis. Experiments vary greatly in their goal and scale, but always rely on repeatable procedure and logical analysis of the results...
ation. Disadvantages of rovers compared to orbiters are the higher chance of failure, due to landing and other risks, and that they are limited to a small area around a landing site which itself is only approximately anticipated.
Features
Rovers arrive on spacecraft and are used in conditions very distinct from those on the Earth, which makes some demands on their design.Reliability
Rovers have to withstand high levels of acceleration, high and low temperatures, pressurePressure
Pressure is the force per unit area applied in a direction perpendicular to the surface of an object. Gauge pressure is the pressure relative to the local atmospheric or ambient pressure.- Definition :...
, dust, corrosion
Corrosion
Corrosion is the disintegration of an engineered material into its constituent atoms due to chemical reactions with its surroundings. In the most common use of the word, this means electrochemical oxidation of metals in reaction with an oxidant such as oxygen...
, cosmic rays, remaining functional without repair for a needed period of time.
Compactness
Rovers are usually packed for placing in a spacecraft, because it has limited capacity, and have to be deployed. They are also attached to a spacecraft, so devices for removing these connections are installed.Autonomy
Rovers which land on celestial bodies far from the Earth, such as the Mars Exploration Rovers, cannot be remotely controlled in real-time since the speed at which radio signals travelSpeed of light
The speed of light in vacuum, usually denoted by c, is a physical constant important in many areas of physics. Its value is 299,792,458 metres per second, a figure that is exact since the length of the metre is defined from this constant and the international standard for time...
is far too slow for real time or near-real time communication. These rovers are thus capable of operating autonomously
Autonomous robot
Autonomous robots are robots that can perform desired tasks in unstructured environments without continuous human guidance. Many kinds of robots have some degree of autonomy. Different robots can be autonomous in different ways...
with little assistance from ground control as far as navigation and data acquisition
Data acquisition
Data acquisition is the process of sampling signals that measure real world physical conditions and converting the resulting samples into digital numeric values that can be manipulated by a computer. Data acquisition systems typically convert analog waveforms into digital values for processing...
are concerned although they still require human input for identifying promising targets to drive to in the distance and determining how to position itself to maximize solar energy if it depends on solar panels for power.
Lunokhod 1A
The Soviet rover intended to be a first roving remote-controlled robotRobot
A robot is a mechanical or virtual intelligent agent that can perform tasks automatically or with guidance, typically by remote control. In practice a robot is usually an electro-mechanical machine that is guided by computer and electronic programming. Robots can be autonomous, semi-autonomous or...
on the Moon
Moon
The Moon is Earth's only known natural satellite,There are a number of near-Earth asteroids including 3753 Cruithne that are co-orbital with Earth: their orbits bring them close to Earth for periods of time but then alter in the long term . These are quasi-satellites and not true moons. For more...
but crashed during a failed start of the launcher 19 February 1969.
Lunokhod 1
The Lunokhod 1Lunokhod 1
Lunokhod 1 was the first of two unmanned lunar rovers landed on the Moon by the Soviet Union as part of its Lunokhod program. The spacecraft which carried Lunokhod 1 was named Luna 17...
rover landed on the Moon in November 1970. It was the first roving remote-controlled robot to land on any celestial body. The Soviet Union
Soviet Union
The Soviet Union , officially the Union of Soviet Socialist Republics , was a constitutionally socialist state that existed in Eurasia between 1922 and 1991....
launched Lunokhod 1 aboard the Luna 17
Luna 17
-External links:*...
spacecraft on November 10, 1970, and it entered lunar orbit on November 15. The spacecraft soft-landed in the Sea of Rains region on November 17. The lander had dual ramps from which Lunokhod 1 could descend to the lunar surface, which it did at 06:28 UT. From November 17, 1970 to November 22, 1970 the rover drove 197 m, and during 10 communication sessions returned 14 close up pictures of the Moon and 12 panoramic views. It also analyzed the lunar soil. The last successful communications session with Lunokhod 1 was on September 14, 1971. Having worked for 11 months,
Lunokhod 1 held the durability record for space rovers for more than 30 years, until a new record was set by the Mars Exploration Rover
Mars Exploration Rover
NASA's Mars Exploration Rover Mission is an ongoing robotic space mission involving two rovers, Spirit and Opportunity, exploring the planet Mars...
s.
Apollo Lunar Roving Vehicle
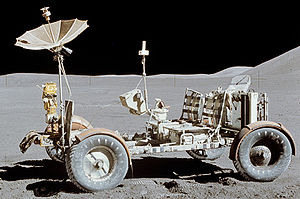
NASA
NASA
The National Aeronautics and Space Administration is the agency of the United States government that is responsible for the nation's civilian space program and for aeronautics and aerospace research...
included Lunar Roving Vehicles in three Apollo missions: Apollo 15
Apollo 15
Apollo 15 was the ninth manned mission in the American Apollo space program, the fourth to land on the Moon and the eighth successful manned mission. It was the first of what were termed "J missions", long duration stays on the Moon with a greater focus on science than had been possible on previous...
(which landed on the Moon July 30, 1971), Apollo 16
Apollo 16
Young and Duke served as the backup crew for Apollo 13; Mattingly was slated to be the Apollo 13 command module pilot until being pulled from the mission due to his exposure to rubella through Duke.-Backup crew:...
(which landed April 21, 1972) and Apollo 17
Apollo 17
Apollo 17 was the eleventh and final manned mission in the American Apollo space program. Launched at 12:33 a.m. EST on December 7, 1972, with a three-member crew consisting of Commander Eugene Cernan, Command Module Pilot Ronald Evans, and Lunar Module Pilot Harrison Schmitt, Apollo 17 remains the...
(which landed December 11, 1972).
Lunokhod 2

The Lunokhod 2
Lunokhod 2
Lunokhod 2 was the second of two unmanned lunar rovers landed on the Moon by the Soviet Union as part of the Lunokhod program....
was the second of two unmanned lunar rovers landed on the Moon
Moon
The Moon is Earth's only known natural satellite,There are a number of near-Earth asteroids including 3753 Cruithne that are co-orbital with Earth: their orbits bring them close to Earth for periods of time but then alter in the long term . These are quasi-satellites and not true moons. For more...
by the Soviet Union
Soviet Union
The Soviet Union , officially the Union of Soviet Socialist Republics , was a constitutionally socialist state that existed in Eurasia between 1922 and 1991....
as part of the Lunokhod program. The rover became operational on the Moon
Moon
The Moon is Earth's only known natural satellite,There are a number of near-Earth asteroids including 3753 Cruithne that are co-orbital with Earth: their orbits bring them close to Earth for periods of time but then alter in the long term . These are quasi-satellites and not true moons. For more...
on 16 January 1973.
It was the second roving remote-controlled robot
Robot
A robot is a mechanical or virtual intelligent agent that can perform tasks automatically or with guidance, typically by remote control. In practice a robot is usually an electro-mechanical machine that is guided by computer and electronic programming. Robots can be autonomous, semi-autonomous or...
to land on any celestial body. The Soviet Union
Soviet Union
The Soviet Union , officially the Union of Soviet Socialist Republics , was a constitutionally socialist state that existed in Eurasia between 1922 and 1991....
launched Lunokhod 2 aboard the Luna 21
Luna 21
-External links:*...
spacecraft on January 8, 1973, and it entered lunar orbit on January 12. The spacecraft soft-landed in the eastern edge of the Mare Serenitatis
Mare Serenitatis
Mare Serenitatis is a lunar mare that sits just to the east of Mare Imbrium on the Moon.It is located within the Serenitatis basin, which is of the Nectarian epoch. The material surrounding the mare is of the Lower Imbrian epoch, while the mare material is of the Upper Imbrian epoch...
region on January 15. Lunokhod 2 descended from the lander's dual ramps to the lunar surface at 01:14 UT on 16 January. Lunokhod 2 operated for about 4 months, covered 37 km (23 mi) of terrain sending back 86 panoramic images and over 80,000 TV pictures. It also analyzed the lunar soil.
Prop-M Rover
The Soviet Mars 2 and Mars 3 landers had a small 4.5 kg Mars rover on board, which would have moved across the surface on skis while connected to the lander with a 15-meter umbilical. Two small metal rods were used for autonomous obstacle avoidance, as radio signals from Earth would have taken too long to drive the rovers using remote control. The rover was planned to be placed on the surface after landing by a manipulator arm and to move in the field of view of the television cameras and stop to make measurements every 1.5 meters. The traces of movement in the Martian soil would also have been recorded to determine material properties. Because of the demise of both the landers, the rover was not deployed.
Lunokhod 3
The built but unlaunched Soviet rover was intended to be the third roving remote-controlled robot on the Moon in 1977. The mission was canceled due to lack of launcher availability and funding.Marsokhod
The unrealised heavy Soviet remote-controlled and automatic rover for Mars by Mars 4NM project planned to be launched (after 1973 according to plans of 1970) aboard on N1 superrocketN1 rocket
N-1 was a heavy lift rocket intended to deliver payloads beyond low Earth orbit, acting as the Soviet counterpart to the NASA Saturn V rocket. This heavy lift booster had the capability of lifting very heavy loads into orbit, designed with manned extra-orbital travel in mind...
that never flew successfully.
Sojourner

The Mars Pathfinder
Mars Pathfinder
Mars Pathfinder was an American spacecraft that landed a base station with roving probe on Mars in 1997. It consisted of a lander, renamed the Carl Sagan Memorial Station, and a lightweight wheeled robotic rover named Sojourner.Launched on December 4, 1996 by NASA aboard a Delta II booster a...
mission included Sojourner, the first rover to successfully reach another planet. NASA
NASA
The National Aeronautics and Space Administration is the agency of the United States government that is responsible for the nation's civilian space program and for aeronautics and aerospace research...
, the space agency of the United States
United States
The United States of America is a federal constitutional republic comprising fifty states and a federal district...
, launched Mars Pathfinder on 1996-12-04; it landed on Mars
Mars
Mars is the fourth planet from the Sun in the Solar System. The planet is named after the Roman god of war, Mars. It is often described as the "Red Planet", as the iron oxide prevalent on its surface gives it a reddish appearance...
in a region called Chryse Planitia
Chryse Planitia
Chryse Planitia is a smooth circular plain in the northern equatorial region of Mars close to the Tharsis region to the west, centered at . Chryse Planitia lies partially in the Lunae Palus quadrangle and partially in the Oxia Palus quadrangle...
on 1997-07-04. From its landing until the final data transmission on 1997-09-27, Mars Pathfinder returned 16,500 images from the lander and 550 images from Sojourner, as well as data from more than 15 chemical analyses of rocks and soil and extensive data on winds and other weather factors.
Mars Exploration Rover B "Opportunity"
Planned rover missions

Mars Science Laboratory Rover "Curiosity"
On 26 November 2011, NASA's Mars Science LaboratoryMars Science Laboratory
The Mars Science Laboratory is a National Aeronautics and Space Administration mission with the aim to land and operate a rover named Curiosity on the surface of Mars. The MSL was launched November 26, 2011, at 10:02 EST and is scheduled to land on Mars at Gale Crater between August 6 and 20, 2012...
mission was successfully launched for Mars. The mission is scheduled to land the robotic "Curiosity" rover on the surface of Mars in August 2012, whereupon the rover will search for evidence of past or present life on Mars.
Chang'e 3
Chang'e 3 is a ChinesePeople's Republic of China
China , officially the People's Republic of China , is the most populous country in the world, with over 1.3 billion citizens. Located in East Asia, the country covers approximately 9.6 million square kilometres...
lunar rover
Exploration of the Moon
The physical exploration of the Moon began when Luna 2, a space probe launched by the Soviet Union, made an impact on the surface of the Moon on September 14, 1959. Prior to that the only available means of exploration had been observation. The invention of the optical telescope brought about the...
scheduled for launch in 2013. It will be China's first lunar rover, part of the second phase of the Chinese Lunar Exploration Program
Chinese Lunar Exploration Program
Chinese Lunar Exploration Program , also known as the Chang'e program, is a program of robotic and human missions to the Moon undertaken by the China National Space Administration , the space agency of the People's Republic of China...
undertaken by China National Space Administration
China National Space Administration
The China National Space Administration is the national space agency of the People's Republic of China responsible for the national space program. It is responsible for planning and development of space activities...
(CNSA).
Chandrayaan 2
The Chandrayaan-II mission is a joint venture between India and Russia, consisting of a lunar orbiter and a lunar lander. An opportunity was given to students to design this rover. 150 students gave their designs but only 6 were selected. They gave a demonstration in NRSA and are going to ISRO.The Russian designed rover weighs 50 kg, will have six wheels and will be running on solar power. It will land near one of the poles and will operate for a year, roving up to 150 km at a maximum speed of 360 m/h. The proposed launch date is 2014.ExoMars Rover
The European Space Agency (ESA) is currently designing and carrying out early prototyping and testing of the ExoMars Rover which is scheduled for launch in 2018.Future lunar missions
NASA's plans for future moon missions call for rovers that have a far longer range than the Apollo rovers.See also
- Lander (spacecraft)Lander (spacecraft)A lander is a spacecraft which descends toward and comes to rest on the surface of an astronomical body. For bodies with atmospheres, the landing is called atmospheric reentry and the lander descends as a re-entry vehicle...
- LORAX (robot)LORAX (robot)The Life On ice: Robotic Antarctic eXplorer or LORAX is an experimental robotics project being developed by the Robotics Institute of Carnegie Mellon University, supported by NASA. The intent of the project is to create an autonomous rover to survey the distribution of microbes on Antarctica's ice...