

Mars Science Laboratory
Encyclopedia
NASA
The National Aeronautics and Space Administration is the agency of the United States government that is responsible for the nation's civilian space program and for aeronautics and aerospace research...
(NASA) mission with the aim to land and operate a rover
Rover (space exploration)
A rover is a space exploration vehicle designed to move across the surface of a planet or other astronomical body. Some rovers have been designed to transport members of a human spaceflight crew; others have been partially or fully autonomous robots...
named Curiosity on the surface of Mars
Mars
Mars is the fourth planet from the Sun in the Solar System. The planet is named after the Roman god of war, Mars. It is often described as the "Red Planet", as the iron oxide prevalent on its surface gives it a reddish appearance...
. The MSL was launched November 26, 2011, at 10:02 EST and is scheduled to land on Mars at Gale Crater
Gale (crater)
Gale is a crater on Mars, near the border of the lowlands of Elysium Planitia at . It is 154 km in diameter and believed to be about 3.5 to 3.8 billion years old...
between August 6 and 20, 2012. The rover Curiosity, attempting a more precise landing than ever attempted previously, is intended to help assess Mars's habitability
Planetary habitability
Planetary habitability is the measure of a planet's or a natural satellite's potential to sustain life. Life may develop directly on a planet or satellite or be transferred to it from another body, a theoretical process known as panspermia...
. Its primary mission objective is to determine whether Mars is or has ever been an environment able to support life
Microorganism
A microorganism or microbe is a microscopic organism that comprises either a single cell , cell clusters, or no cell at all...
but it will not look for any life itself. It is also intended to analyze samples scooped up from the soil and drilled from rocks
Rock (geology)
In geology, rock or stone is a naturally occurring solid aggregate of minerals and/or mineraloids.The Earth's outer solid layer, the lithosphere, is made of rock. In general rocks are of three types, namely, igneous, sedimentary, and metamorphic...
.
Curiosity is five times as large, and carries more than ten times the mass of scientific instruments as the Mars Exploration Rovers Spirit
Spirit rover
Spirit, MER-A , is a robotic rover on Mars, active from 2004 to 2010. It was one of two rovers of NASA's ongoing Mars Exploration Rover Mission. It landed successfully on Mars at 04:35 Ground UTC on January 4, 2004, three weeks before its twin, Opportunity , landed on the other side of the planet...
or Opportunity
Opportunity rover
Opportunity, MER-B , is a robotic rover on the planet Mars, active since 2004. It is the remaining rover in NASA's ongoing Mars Exploration Rover Mission...
did. The MSL rover Curiosity was launched by an Atlas V 541
Atlas V
Atlas V is an active expendable launch system in the Atlas rocket family. Atlas V was formerly operated by Lockheed Martin, and is now operated by the Lockheed Martin-Boeing joint venture United Launch Alliance...
rocket and is expected to operate for at least 686 days as it explores with greater range than any previous Mars rover.
Mars Science Laboratory mission is part of NASA's Mars Exploration Program, a long-term effort of robotic exploration of Mars, and the project is managed by the Jet Propulsion Laboratory
Jet Propulsion Laboratory
Jet Propulsion Laboratory is a federally funded research and development center and NASA field center located in the San Gabriel Valley area of Los Angeles County, California, United States. The facility is headquartered in the city of Pasadena on the border of La Cañada Flintridge and Pasadena...
of California Institute of Technology
California Institute of Technology
The California Institute of Technology is a private research university located in Pasadena, California, United States. Caltech has six academic divisions with strong emphases on science and engineering...
for NASA. The total cost of the MSL project is about US$2.5 billion.
Goals and objectives
The MSL mission has four scientific goals:- Determine whether Mars could ever have supported lifeLife on MarsScientists have long speculated about the possibility of life on Mars owing to the planet's proximity and similarity to Earth. Fictional Martians have been a recurring feature of popular entertainment of the 20th and 21st centuries, but it remains an open question whether life currently exists on...
- Study the climate of MarsClimate of MarsThe climate of Mars has been an issue of scientific curiosity for centuries, not least because Mars is the only terrestrial planet whose surface can be directly observed in detail from the Earth....
- Study the geology of MarsGeology of MarsThe geology of Mars is the scientific study of the surface, crust, and interior of the planet Mars. It emphasizes the composition, structure, history, and physical processes that shape the planet. It is fully analogous to the field of terrestrial geology. In planetary science, the term geology is...
- Plan for a human mission to MarsManned mission to MarsA manned mission to Mars has been the subject of science fiction, engineering, and scientific proposals throughout the 20th century and into the 21st century...
To contribute to these goals, MSL has six main scientific objectives:
- Determine the mineralogical composition of the Martian surface and near-surface geological materials.
- Attempt to detect chemical building blocks of life (bio-signatures).
- Interpret the processes that have formed and modified rocksRock (geology)In geology, rock or stone is a naturally occurring solid aggregate of minerals and/or mineraloids.The Earth's outer solid layer, the lithosphere, is made of rock. In general rocks are of three types, namely, igneous, sedimentary, and metamorphic...
and soilSoilSoil is a natural body consisting of layers of mineral constituents of variable thicknesses, which differ from the parent materials in their morphological, physical, chemical, and mineralogical characteristics...
s. - Assess long-timescale (i.e., 4-billion-year) Martian atmosphericAtmosphere of MarsThe atmosphere of Mars is relatively thin and is composed mostly of carbon dioxide . There has been interest in studying its composition since the detection of trace amounts of methane, which may indicate the presence of life on Mars, but may also be produced by a geochemical process, volcanic or...
evolution processes. - Determine present state, distribution, and cycling of water and carbon dioxideCarbon dioxideCarbon dioxide is a naturally occurring chemical compound composed of two oxygen atoms covalently bonded to a single carbon atom...
. - Characterize the broad spectrum of surface radiation, including galactic radiationGalactic cosmic rayGalactic cosmic rays are cosmic rays that have their origin inside our Galaxy. GCRs are high-energy charged particles, and are usually protons, electrons, and fully ionized nuclei of light elements...
, cosmic radiation, solar proton eventSolar proton eventA Solar proton event occurs when protons emitted by the Sun become accelerated to very high energies either close to the Sun during a solar flare or in interplanetary space by the shocks associated with coronal mass ejections. These high energy protons cause several effects. They can penetrate the...
s and secondary neutrons.
History
In April 2008, it was reported that the project was $235 million, or 24%, over budget, and that the money to compensate this overrun may have to come from other NASA Mars missions. By October 2008 MSL was getting closer to a 30% cost overrun. As of November 2008, development was essentially finished, much of the MSL hardware and software complete and testing ongoing. On December 3, 2008, NASA announced that the MSL launch would be delayed until the fall of 2011 because of inadequate test time. The technical and budgetary reasons behind the delay were explained to the Planetary Science Community in a January 2009 meeting at NASA Headquarters.From March 23–29, 2009, the general public had an opportunity to rank nine finalist names through a public poll on the NASA website as additional input for judges to consider the MSL rover name. On May 27, 2009 the winning name, Curiosity was selected, which was submitted by a sixth-grader, Clara Ma, from Kansas in an essay contest.
In late June 2010, engineers completed the installation of the suspension and wheel assemblies on the rover body.
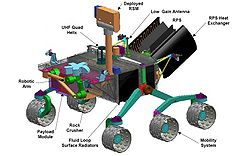
Specifications


- Dimensions: The rover Curiosity is 10 ft (3 m) in length, and weighs 1984 lb (899.9 kg) including 176 lb (79.8 kg) of scientific instruments. It is approximately the size of a Mini Cooper automobile. This compares to the Mars Exploration Rovers which have a length of 5 ft (1.5 m) and weigh 384 lb (174.2 kg) including 15 lb (6.8 kg) of scientific instruments.
- Speed: Once on the surface, Curiosity will be able to roll over obstacles approaching 75 cm (29.5 in) high. Maximum terrain-traverse speed is estimated to be 90 m (295.3 ft) per hour by automatic navigation, however, average traverse speeds will likely be about 30 m (98.4 ft) per hour, based on variables including power levels, difficulty of the terrain, slippage, and visibility. MSL is expected to traverse a minimum of 12 mi (19.3 km) in its two-year mission.
- Power source: Curiosity is powered by a radioisotope thermoelectric generatorRadioisotope thermoelectric generatorA radioisotope thermoelectric generator is an electrical generator that obtains its power from radioactive decay. In such a device, the heat released by the decay of a suitable radioactive material is converted into electricity by the Seebeck effect using an array of thermocouples.RTGs can be...
(RTG), as used by the successful Mars landers Viking 1Viking 1Viking 1 was the first of two spacecraft sent to Mars as part of NASA's Viking program. It was the first spacecraft to successfully land on Mars and perform its mission, and until May 19, 2010 held the record for the second longest Mars surface mission of 6 years and 116 days .- Mission :Following...
and Viking 2Viking 2The Viking 2 mission was part of the American Viking program to Mars, and consisted of an orbiter and a lander essentially identical to that of the Viking 1 mission. The Viking 2 lander operated on the surface for 1,281 Mars days and was turned off on 11 April 1980 when its batteries failed...
in 1976.
- Radioisotope power systems (RPSs) are generators that produce electricity from the natural decay of plutonium-238Plutonium-238-External links:**...
, which is a non-fissileFissileIn nuclear engineering, a fissile material is one that is capable of sustaining a chain reaction of nuclear fission. By definition, fissile materials can sustain a chain reaction with neutrons of any energy. The predominant neutron energy may be typified by either slow neutrons or fast neutrons...
isotope of plutonium. Heat given off by the natural decay of this isotope is converted into electricity, providing constant power during all seasons and through the day and night, and waste heatWaste heatWaste heat sometimes called Secondary heat or Low-grade heat refers to heat produced by machines, electrical equipment and industrial processes for which no useful application is found. Energy is often produced by a heat engine, running on a source of high-temperature heat...
can be used via pipes to warm systems, freeing electrical power for the operation of the vehicle and instruments. Curiosity's RTG contains 10.6 pounds (4.8 kilograms) of plutonium-238Plutonium-238-External links:**...
dioxide supplied by the U.S. Department of Energy.
- Curiosity's power generator is the latest RTG generation built by BoeingBoeingThe Boeing Company is an American multinational aerospace and defense corporation, founded in 1916 by William E. Boeing in Seattle, Washington. Boeing has expanded over the years, merging with McDonnell Douglas in 1997. Boeing Corporate headquarters has been in Chicago, Illinois since 2001...
, called the "Multi-Mission Radioisotope Thermoelectric GeneratorMulti-Mission Radioisotope Thermoelectric GeneratorMulti-Mission Radioisotope Thermoelectric Generator are a type of Radioisotope Thermoelectric Generator developed for NASA space missions including manned ones such as the Apollo program as well as unmanned ones ranging from Viking 1 through the Mars Science Laboratory...
" or MMRTG. Based on classical RTG technology, it represents a more flexible and compact development step, and is designed to produce 125 watts of electrical power from about 2000 watts of thermal power at the start of the mission. The MMRTG produces less power over time as its plutonium fuel decays: at its minimum lifetime of 14 years, electrical power output is down to 100 watts. The MSL will generate 2.5 kilowatt hours per day compared to the Mars Exploration RoverMars Exploration RoverNASA's Mars Exploration Rover Mission is an ongoing robotic space mission involving two rovers, Spirit and Opportunity, exploring the planet Mars...
s which can generate about 0.6 kilowatt hours per day. The MMRTG aboard Curiosity is fueled by 32 pellets each about the size of a marshmallowMarshmallowThe marshmallow is a confection that, in its modern form, typically consists of sugar, corn syrup, water, gelatin that has been softened in hot water, dextrose, vanilla flavourings, and sometimes colouring, whipped to a spongy consistency. Some marshmallow recipes call for egg whites...
.
- Heat rejection system: The temperatures in the potential areas at which Curiosity may land can vary from +30 to −127 °C (+86 °F to −197 °F). Therefore, the Heat rejection system (HRS) uses fluid pumped through 60 m (196.9 ft) of tubing in the MSL body so that sensitive components are kept at optimal temperatures. Other methods of heating the internal components include using radiated heat generated from the components in the craft itself, as well as excess heat from the MMRTG unit. The HRS also has the ability to cool components if necessary.
- Computers: The two identical on-board rover computers, called "Rover Compute Element" (RCE), contain radiation hardenedRadiation hardeningRadiation hardening is a method of designing and testing electronic components and systems to make them resistant to damage or malfunctions caused by ionizing radiation , such as would be encountered in outer space, high-altitude flight, around nuclear reactors, particle accelerators, or during...
memory to tolerate the extreme radiation environment from space and to safeguard against power-off cycles. Each computer's memory includes 256 KBKilobitThe kilobit is a multiple of the unit bit for digital information or computer storage. The prefix kilo is defined in the International System of Units as a multiplier of 103 , and therefore,...
of EEPROMEEPROMEEPROM stands for Electrically Erasable Programmable Read-Only Memory and is a type of non-volatile memory used in computers and other electronic devices to store small amounts of data that must be saved when power is removed, e.g., calibration...
, 256 MBMegabitThe megabit is a multiple of the unit bit for digital information or computer storage. The prefix mega is defined in the International System of Units as a multiplier of 106 , and therefore...
of DRAMDynamic random access memoryDynamic random-access memory is a type of random-access memory that stores each bit of data in a separate capacitor within an integrated circuit. The capacitor can be either charged or discharged; these two states are taken to represent the two values of a bit, conventionally called 0 and 1...
, and 2 GBGigabitThe gigabit is a multiple of the unit bit for digital information or computer storage. The prefix giga is defined in the International System of Units as a multiplier of 109 , and therefore...
of flash memoryFlash memoryFlash memory is a non-volatile computer storage chip that can be electrically erased and reprogrammed. It was developed from EEPROM and must be erased in fairly large blocks before these can be rewritten with new data...
. This compares to 3 MB of EEPROM, 128 MB of DRAM, and 256 MB of flash memory used in the Mars Exploration Rovers.
- The RCE computers use the RAD750RAD750The RAD750 is a radiation-hardened single board computer, based on IBM's PowerPC 750. The successor of the RAD6000, the RAD750 is manufactured by BAE Systems Electronic Solutions. It is intended for use in high radiation environments such as experienced on board satellites and spacecraft...
CPUCentral processing unitThe central processing unit is the portion of a computer system that carries out the instructions of a computer program, to perform the basic arithmetical, logical, and input/output operations of the system. The CPU plays a role somewhat analogous to the brain in the computer. The term has been in...
which is a successor to the RAD6000 CPU used in the Mars Exploration Rovers. The RAD750 CPU is capable of up to 400 MIPS while the RAD6000 CPU is capable of up to 35 MIPS.
- The rover has an Inertial Measurement Unit (IMU) that provides 3-axis information on its position which is used in rover navigation. The rover's computers are constantly self-monitoring to keep the rover operational, such as by regulating the rover's temperature. Activities such as taking pictures, driving, and operating the instruments are performed in a command sequence that is sent from the flight team to the rover. In the event of problems with the main computer, the backup computer will take over.
- Communications: Curiosity has two means of communication – an X-band transmitter and receiverTransponder (Satellite communications)A communications satellite’s transponder, is the series of interconnected units which form a communications channel between the receiving and the transmitting antennas .A transponder is typically composed of:...
that can communicate directly with Earth, and a UHF Electra (radio)Electra (radio)Electra, more formally the Electra Proximity Payload, is a software-defined radio defined and implemented by the Jet Propulsion Laboratory for use between spacecraft. It is typically used by a lander to communicate with an orbiter that can then communicate with Earth...
-lite software-defined radioSoftware-defined radioA software-defined radio system, or SDR, is a radio communication system where components that have been typically implemented in hardware are instead implemented by means of software on a personal computer or embedded computing devices...
for communicating with Mars orbiters. Communication with orbiters is expected to be the main contributor to data return to Earth, since the orbiters have both more power and larger antennas than the lander. At landing time, 13 minutes, 46 seconds will be required for signals to travel between Earth and Mars.
- Mobility systems: Like previous rovers Mars Exploration RoverMars Exploration RoverNASA's Mars Exploration Rover Mission is an ongoing robotic space mission involving two rovers, Spirit and Opportunity, exploring the planet Mars...
s and Mars PathfinderMars PathfinderMars Pathfinder was an American spacecraft that landed a base station with roving probe on Mars in 1997. It consisted of a lander, renamed the Carl Sagan Memorial Station, and a lightweight wheeled robotic rover named Sojourner.Launched on December 4, 1996 by NASA aboard a Delta II booster a...
, Curiosity is equipped with 6 wheels in a rocker-bogieRocker-bogieThe Rocker-Bogie system is the suspension arrangement used in the Mars rovers introduced for the Mars Pathfinder and also used on the Mars Exploration Rover and Mars Science Laboratory missions. It is currently NASA's favored design....
suspension. The suspension system will also serve as landing gear for the vehicle, unlike its smaller predecessors. Curiosity's wheels are significantly larger than those used on previous rover. Each wheel has a pattern which helps it maintain traction but also leaves patterned tracks in the sandy surface of Mars. That pattern is used by on-board cameras to judge the distance travelled. The pattern itself is Morse codeMorse codeMorse code is a method of transmitting textual information as a series of on-off tones, lights, or clicks that can be directly understood by a skilled listener or observer without special equipment...
for "JPL" (·--- ·--· ·-··).
Payload
The following instruments have been selected for development or production for the MSL rover Curiosity.- Cameras: The MastCam, MAHLI, and MARDI cameras were developed by Malin Space Science SystemsMalin Space Science SystemsMalin Space Science Systems is a San Diego, California company that designs, develops, and operates instruments to fly on unmanned spacecraft. MSSS is headed by chief scientist and CEO Michael C. Malin....
and they all share common design components, such as on-board electronic imaging processingImage processingIn electrical engineering and computer science, image processing is any form of signal processing for which the input is an image, such as a photograph or video frame; the output of image processing may be either an image or, a set of characteristics or parameters related to the image...
boxes, 1600×1200 CCDsCharge-coupled deviceA charge-coupled device is a device for the movement of electrical charge, usually from within the device to an area where the charge can be manipulated, for example conversion into a digital value. This is achieved by "shifting" the signals between stages within the device one at a time...
, and a RGB Bayer pattern filterBayer filterA Bayer filter mosaic is a color filter array for arranging RGB color filters on a square grid of photosensors. Its particular arrangement of color filters is used in most single-chip digital image sensors used in digital cameras, camcorders, and scanners to create a color image...
. Filmmaker and inventor of 3D camera technology James CameronJames CameronJames Francis Cameron is a Canadian-American film director, film producer, screenwriter, editor, environmentalist and inventor...
participated in early design work on the MastCam. Zoom capability was not included in the final design because of time required to test the new technology and the looming November 2011 launch date.
- MastCam: This system will provide multiple spectra and true color imaging with two cameras. The cameras can take true color images at 1600×1200 pixels and up to 10 frames per second hardware-compressed, high-definition video at 720p720p720p is the shorthand name for 1280x720, a category of High-definition television video modes having a resolution of 1080 or 720p and a progressive scan...
(1280×720). One camera will be the Medium Angle Camera (MAC) which has a 34 mm focal lengthFocal lengthThe focal length of an optical system is a measure of how strongly the system converges or diverges light. For an optical system in air, it is the distance over which initially collimated rays are brought to a focus...
, a 15-degree field of viewField of viewThe field of view is the extent of the observable world that is seen at any given moment....
, and can yield 22 cm/pixel scale at 1 km. The other camera will be the Narrow Angle Camera (NAC) which has a 100 mm focal length, a 5.1-degree field of view, and can yield 7.4 cm/pixel scale at 1 km. Malin is also developing a pair of Mastcams with zoom lens, which NASA may choose to fly instead of the fixed focal length cameras. Each camera will have 8 GB of flash memory, which is capable of storing over 5,500 raw images, and can apply real time losslessLossless data compressionLossless data compression is a class of data compression algorithms that allows the exact original data to be reconstructed from the compressed data. The term lossless is in contrast to lossy data compression, which only allows an approximation of the original data to be reconstructed, in exchange...
or JPEG compression. The cameras have an autofocus capability which allows them to focus on objects from 2.1 m (6.9 ft) to infinity. Each camera will also have a RGB Bayer pattern filter with 8 filter positions. In comparison to the 1024×1024 black and white panoramic cameras used on the Mars Exploration Rover (MER)Mars Exploration RoverNASA's Mars Exploration Rover Mission is an ongoing robotic space mission involving two rovers, Spirit and Opportunity, exploring the planet Mars...
, the MAC MastCam will have 1.25× higher spatial resolutionAngular resolutionAngular resolution, or spatial resolution, describes the ability of any image-forming device such as an optical or radio telescope, a microscope, a camera, or an eye, to distinguish small details of an object...
and the NAC MastCam will have 3.67× higher spatial resolution. - Mars Hand Lens Imager (MAHLI): This system will consist of a camera mounted to a robotic arm on the rover. It will be used to acquire microscopic images of rock and soil. MAHLI can take true color images at 1600×1200 pixelPixelIn digital imaging, a pixel, or pel, is a single point in a raster image, or the smallest addressable screen element in a display device; it is the smallest unit of picture that can be represented or controlled....
s with a resolution as high as 14.5 micrometersMicrometreA micrometer , is by definition 1×10-6 of a meter .In plain English, it means one-millionth of a meter . Its unit symbol in the International System of Units is μm...
per pixel. MAHLI has a 18.3 mm to 21.3 mm focal length and a 33.8- to 38.5-degree field of view. MAHLI will have both white and ultraviolet LEDLEdLEd is a TeX/LaTeX editing software working under Microsoft Windows. It is a freeware product....
illumination for imaging in darkness or imaging fluorescenceFluorescenceFluorescence is the emission of light by a substance that has absorbed light or other electromagnetic radiation of a different wavelength. It is a form of luminescence. In most cases, emitted light has a longer wavelength, and therefore lower energy, than the absorbed radiation...
. MAHLI will also have mechanical focusing in a range from infinite to millimetre distances. MAHLI can store either the raw images or do realtime lossless predictive or JPEG compression. - MSL Mars Descent Imager (MARDI): During the descent to the Martian surface, MARDI will take color images at 1600×1200 pixels with a 1.3-millisecond exposure time starting at distances of about 3.7 km to near 5 meters from the ground and will take images at a rate of 5 frames per second for about 2 minutes. MARDI has a pixel scale of 1.5 meters at 2 km to 1.5 millimeters at 2 meters and has a 90-degree circular field of view. MARDI will have 8 GB of internal buffer memory which is capable of storing over 4,000 raw images. MARDI imaging will allow the mapping of surrounding terrain and the location of landing. JunoCamJunoCamJunoCam is a visible-light camera/telescope for the Juno Jupiter Orbiter, a NASA space probe to the planet Jupiter launched on 5 August 2011...
, for another spacecraft, is based on MARDI.
- ChemCam: ChemCam is a suite of remote sensing instruments, including the first laser-induced breakdown spectroscopy (LIBS) system to be used for planetary science and a remote micro-imager (RMI). The LIBS instrument can target a rock or soil sample from up to 7 meters away, vaporizing a small amount of it and then collecting a spectrum of the light emitted by the vaporized rock. An infrared laser with 1067 nmNanometreA nanometre is a unit of length in the metric system, equal to one billionth of a metre. The name combines the SI prefix nano- with the parent unit name metre .The nanometre is often used to express dimensions on the atomic scale: the diameter...
wavelengthWavelengthIn physics, the wavelength of a sinusoidal wave is the spatial period of the wave—the distance over which the wave's shape repeats.It is usually determined by considering the distance between consecutive corresponding points of the same phase, such as crests, troughs, or zero crossings, and is a...
and a 5 nanosecond pulse will focus on a sub-millimeter spot with a power in excess of 10 megawatts per square millimeter, depositing 14 mJJouleThe joule ; symbol J) is a derived unit of energy or work in the International System of Units. It is equal to the energy expended in applying a force of one newton through a distance of one metre , or in passing an electric current of one ampere through a resistance of one ohm for one second...
of energy. Detection of the ball of luminous plasma will be done in the visible and near-UV and near-IR range, between 240 nm and 800 nm. Using the same collection optics, the RMI provides context images of the LIBS analysis spots. The RMI resolves 1 mm objects at 10 m distance, and has a field of view covering 20 cm at that distance. The ChemCam instrument suite is being developed by the Los Alamos National LaboratoryLos Alamos National LaboratoryLos Alamos National Laboratory is a United States Department of Energy national laboratory, managed and operated by Los Alamos National Security , located in Los Alamos, New Mexico...
and the French CESRCentre d'Etude Spatiale des RayonnementsThe Centre d'Etude Spatiale des Rayonnements is a French laboratory of space astrophysics. It is located in Toulouse. The centers main areas of investigation are: space plasmas, planetology, the high energy universe, the cold Universe....
laboratory.
- NASA's cost for ChemCam is approximately $10M, including an overrun of about $1.5M, which is less than 1/200th of the total mission costs. The flight model of the Mast Unit was delivered from the French CNESCNESThe is the French government space agency . Established under President Charles de Gaulle in 1961, its headquarters are located in central Paris and it is under the supervision of the French Ministries of Defence and Research...
to Los Alamos National LaboratoryLos Alamos National LaboratoryLos Alamos National Laboratory is a United States Department of Energy national laboratory, managed and operated by Los Alamos National Security , located in Los Alamos, New Mexico...
and was able to deliver the engineering model to JPLJet Propulsion LaboratoryJet Propulsion Laboratory is a federally funded research and development center and NASA field center located in the San Gabriel Valley area of Los Angeles County, California, United States. The facility is headquartered in the city of Pasadena on the border of La Cañada Flintridge and Pasadena...
in February 2008.
- Alpha-particle X-ray spectrometer (APXS): This device will irradiate samples with alpha particles and map the spectra of X-rayX-rayX-radiation is a form of electromagnetic radiation. X-rays have a wavelength in the range of 0.01 to 10 nanometers, corresponding to frequencies in the range 30 petahertz to 30 exahertz and energies in the range 120 eV to 120 keV. They are shorter in wavelength than UV rays and longer than gamma...
s that are re-emitted for determining the elemental composition of samples. The APXS is a form of particle-induced X-ray emission (PIXE), which has previously been used by the Mars PathfinderMars PathfinderMars Pathfinder was an American spacecraft that landed a base station with roving probe on Mars in 1997. It consisted of a lander, renamed the Carl Sagan Memorial Station, and a lightweight wheeled robotic rover named Sojourner.Launched on December 4, 1996 by NASA aboard a Delta II booster a...
and the Mars Exploration RoverMars Exploration RoverNASA's Mars Exploration Rover Mission is an ongoing robotic space mission involving two rovers, Spirit and Opportunity, exploring the planet Mars...
s. The APXS is being developed by the Canadian Space Agency. MacDonald Dettwiler (MDA)MacDonald DettwilerMacDonald, Dettwiler and Associates Ltd. is a Richmond, British Columbia-based Canadian aerospace, information services and products company, employing over 3000 people throughout Canada, the United States and the United Kingdom, under the MDA brand name....
, the Canadian aerospace company that build the Canadarm and RADARSATRADARSATThe RADARSAT constellation is a pair of Canadian Remote Sensing satellites. The constellation consists of:* RADARSAT-1, launched 1995* RADARSAT-2, launched 2007-The Company:...
, will be responsible for the engineering design and building of the APXS. The APXS science team includes members from the University of GuelphUniversity of GuelphThe University of Guelph, also known as U of G, is a comprehensive public research university in Guelph, Ontario, Canada. It was established in 1964 after the amalgamation of Ontario Agricultural College, the Macdonald Institute, and the Ontario Veterinary College...
, the University of New BrunswickUniversity of New BrunswickThe University of New Brunswick is a Canadian university located in the province of New Brunswick. UNB is the oldest English language university in Canada and among the first public universities in North America. The university has two main campuses: the original campus founded in 1785 in...
, the University of Western OntarioUniversity of Western OntarioThe University of Western Ontario is a public research university located in London, Ontario, Canada. The university's main campus covers of land, with the Thames River cutting through the eastern portion of the main campus. Western administers its programs through 12 different faculties and...
, NASANASAThe National Aeronautics and Space Administration is the agency of the United States government that is responsible for the nation's civilian space program and for aeronautics and aerospace research...
, the University of California, San DiegoUniversity of California, San DiegoThe University of California, San Diego, commonly known as UCSD or UC San Diego, is a public research university located in the La Jolla neighborhood of San Diego, California, United States...
and Cornell UniversityCornell UniversityCornell University is an Ivy League university located in Ithaca, New York, United States. It is a private land-grant university, receiving annual funding from the State of New York for certain educational missions...
.
- CheMin: CheMin stands for "Chemistry and Mineralogy" and is a X-Ray diffraction instrument that will quantify minerals and mineral structure of samples. It is being developed by David Blake at NASA Ames Research CenterNASA Ames Research CenterThe Ames Research Center , is one of the United States of America's National Aeronautics and Space Administration 10 major field centers.The centre is located in Moffett Field in California's Silicon Valley, near the high-tech companies, entrepreneurial ventures, universities, and other...
and the NASA's Jet Propulsion LaboratoryJet Propulsion LaboratoryJet Propulsion Laboratory is a federally funded research and development center and NASA field center located in the San Gabriel Valley area of Los Angeles County, California, United States. The facility is headquartered in the city of Pasadena on the border of La Cañada Flintridge and Pasadena...
.
- Sample analysis at Mars (SAM): The SAM instrument suite will analyze organicsOrganic compoundAn organic compound is any member of a large class of gaseous, liquid, or solid chemical compounds whose molecules contain carbon. For historical reasons discussed below, a few types of carbon-containing compounds such as carbides, carbonates, simple oxides of carbon, and cyanides, as well as the...
and gases from both atmospheric and solid samples. It is being developed by the NASA Goddard Space Flight CenterGoddard Space Flight CenterThe Goddard Space Flight Center is a major NASA space research laboratory established on May 1, 1959 as NASA's first space flight center. GSFC employs approximately 10,000 civil servants and contractors, and is located approximately northeast of Washington, D.C. in Greenbelt, Maryland, USA. GSFC,...
, the Laboratoire Inter-Universitaire des Systèmes Atmosphériques (LISA) of France's CNRS and Honeybee RoboticsHoneybee RoboticsHoneybee Robotics Spacecraft Mechanisms Corporation is a small spacecraft technology and robotics company located in Manhattan, New York. It was established in 1983 by Stephen Gorevan and Chris Chapman. Honeybee has particular expertise in developing and operating small mechanical tools used on...
, along with many additional external partners. The SAM suite consists of three instruments:
- The Quadrupole Mass Spectrometer (QMS) will detect gases sampled from the atmosphere or those released from solid samples by heating.
- The Gas Chromatograph (GC) will be used to separate out individual gases from a complex mixture into molecular components with a mass range of 2–235 uAtomic mass unitThe unified atomic mass unit or dalton is a unit that is used for indicating mass on an atomic or molecular scale. It is defined as one twelfth of the rest mass of an unbound neutral atom of carbon-12 in its nuclear and electronic ground state, and has a value of...
. - The Tunable Laser Spectrometer (TLS) will perform precision measurements of oxygen and carbon isotopeIsotopeIsotopes are variants of atoms of a particular chemical element, which have differing numbers of neutrons. Atoms of a particular element by definition must contain the same number of protons but may have a distinct number of neutrons which differs from atom to atom, without changing the designation...
ratios in carbon dioxide (CO2) and methane (CH4) in the atmosphere of Mars in order to distinguish between a geochemicalGeochemistryThe field of geochemistry involves study of the chemical composition of the Earth and other planets, chemical processes and reactions that govern the composition of rocks, water, and soils, and the cycles of matter and energy that transport the Earth's chemical components in time and space, and...
and a biologicalBiologyBiology is a natural science concerned with the study of life and living organisms, including their structure, function, growth, origin, evolution, distribution, and taxonomy. Biology is a vast subject containing many subdivisions, topics, and disciplines...
origin.
- The SAM also has three subsystems: The chemical separation and processing laboratory (CSPL), for enrichment and derivatization of the organic molecules of the sample; the sample manipulation system (SMS) for transporting powder delivered from the MSL drill to a SAM inlet and into one of 74 sample cups. The SMS then moves the sample to the SAM oven to release gases by heating to up to 1000 oC; and the wide range pumps (WRP) subsystem to purge the QMS, TLS, and the CPSL.
- Radiation assessment detector (RAD): This instrument will characterize the broad spectrum of radiation found near the surface of Mars for purposes of determining the viability and shielding needs for human explorers. Funded by the Exploration Systems Mission Directorate at NASA Headquarters and the German space agency, DLR, RAD was developed by Southwest Research InstituteSouthwest Research InstituteSouthwest Research Institute , headquartered in San Antonio, Texas, is one of the oldest and largest independent, nonprofit, applied research and development organizations in the United States...
(SwRI) and the extraterrestrial physics group at Christian-Albrechts-Universität zu KielUniversity of KielThe University of Kiel is a university in the city of Kiel, Germany. It was founded in 1665 as the Academia Holsatorum Chiloniensis by Christian Albert, Duke of Holstein-Gottorp and has approximately 23,000 students today...
, Germany.
- Dynamic albedo of neutrons (DAN): A pulsed neutron sourceNeutron sourceA Neutron source is a device that emits neutrons. There is a wide variety of different sources, ranging from hand-held radioactive sources to neutron research facilities operating research reactors and spallation sources...
and detector for measuring hydrogenHydrogenHydrogen is the chemical element with atomic number 1. It is represented by the symbol H. With an average atomic weight of , hydrogen is the lightest and most abundant chemical element, constituting roughly 75% of the Universe's chemical elemental mass. Stars in the main sequence are mainly...
or ice and water at or near the Martian surface, provided by the Russian Federal Space AgencyRussian Federal Space AgencyThe Russian Federal Space Agency , commonly called Roscosmos and abbreviated as FKA and RKA , is the government agency responsible for the Russian space science program and general aerospace research. It was previously the Russian Aviation and Space Agency .Headquarters of Roscosmos are located...
.
- Rover environmental monitoring station (REMS): Meteorological package and an ultravioletUltravioletUltraviolet light is electromagnetic radiation with a wavelength shorter than that of visible light, but longer than X-rays, in the range 10 nm to 400 nm, and energies from 3 eV to 124 eV...
sensor provided by the Spanish Ministry of Education and ScienceSpanish GovernmentSpain is a constitutional monarchy whose government is defined by the Constitution of Spain. This was approved by a general referendum of the people of Spain in 1978...
, with Finnish Meteorological InstituteFinnish Meteorological InstituteThe Finnish Meteorological Institute is the government agency responsible for gathering and reporting weather data and forecasts in Finland. It is a part of the Ministry of Transport and Communications but it operates semi-autonomously....
as a partner. It will be mounted on the camera mast and measure atmospheric pressure, humidity, wind currents and direction, air and ground temperature and ultraviolet radiation levels. REMS has been designed to record six atmospheric parameters: wind speed/direction, pressure, relative humidity, air temperature, ground temperature, and ultraviolet radiation. All sensors are located around three elements: two booms attached to the rover Remote Sensing Mast (RSM), the Ultraviolet Sensor (UVS) assembly located on the rover top deck, and the Instrument Control Unit (ICU) inside the rover body. REMS will provide new clues about signature of the Martian general circulation, microscale weather systems, local hydrological cycle, destructive potential of UV radiation, and subsurface habitability based on ground-atmosphere interaction.
- MSL entry descent and landing instrumentation (MEDLI): The MEDLI project’s main objective is to measure aerothermal environments, sub-surface heat shield material response, vehicle orientation, and atmospheric density for the atmospheric entry through the sensible atmosphere down to heat shield separation of the Mars Science Laboratory entry vehicle. The MEDLI instrumentation suite will be installed in the heatshield of the MSL entry vehicle. The acquired data will support future Mars missions by providing measured atmospheric data to validate Mars atmosphereAtmosphere of MarsThe atmosphere of Mars is relatively thin and is composed mostly of carbon dioxide . There has been interest in studying its composition since the detection of trace amounts of methane, which may indicate the presence of life on Mars, but may also be produced by a geochemical process, volcanic or...
models and clarify the design margins on future Mars missions. MEDLI instrumentation consists of three main subsystems: MEDLI Integrated Sensor Plugs (MISP), Mars Entry Atmospheric Data System (MEADS) and the Sensor Support Electronics (SSE).
- Hazard avoidance cameras (Hazcams): The MSL will use two pairs of black and white navigation cameras located on the front left and right and rear left and right of the rover. The Hazard Avoidance Cameras (also called HazcamHazcamHazcams are photographic cameras mounted on the front and rear of NASA's Spirit and Opportunity rover missions to Mars....
s) are used for autonomous hazard avoidance during rover drives and for safe positioning of the robotic arm on rocks and soils. The cameras will use visible light to capture stereoscopicStereoscopyStereoscopy refers to a technique for creating or enhancing the illusion of depth in an image by presenting two offset images separately to the left and right eye of the viewer. Both of these 2-D offset images are then combined in the brain to give the perception of 3-D depth...
three-dimensional (3-D) imagery. The cameras have a 120 degree field of viewField of viewThe field of view is the extent of the observable world that is seen at any given moment....
and map the terrain at up to 10 feet (3 meters) in front of the rover. This imagery safeguards against the rover inadvertently crashing into unexpected obstacles, and works in tandem with software that allows the rover to make its own safety choices.
- Navigation cameras (Navcams): The MSL will use a pair of black and white navigation cameras mounted on the mast to support ground navigation. The cameras will use visible light to capture stereoscopic 3-D imagery. The cameras have a 45 degree field of view.
Launch vehicle
The MSL was launched from Cape Canaveral Air Force Station Space Launch Complex 41 on November 26, 2011 using the Atlas V 541 provided by United Launch AllianceUnited Launch Alliance
United Launch Alliance is a joint venture of Lockheed Martin and Boeing. ULA was formed in December 2006 by combining the teams at these companies which provide spacecraft launch services to the government of the United States. U.S...
. This two stage rocket includes a 3.8 m (12.5 ft) common core booster
Common Core Booster
A modular rocket is a type of multistage rocket which features components that can be interchanged for specific mission requirements. Several such rockets use similar concepts such as unified modules to minimize expenses on manufacturing, transportation and for optimization of support...
(CCB) powered by a single RD-180 engine, four solid rocket booster
Solid rocket booster
Solid rocket boosters or Solid Rocket Motors, SRM, are used to provide thrust in spacecraft launches from the launchpad up to burnout of the SRBs. Many launch vehicles include SRBs, including the Ariane 5, Atlas V , and the NASA Space Shuttle...
s (SRB), and one Centaur III
Centaur (rocket stage)
Centaur is a rocket stage designed for use as the upper stage of space launch vehicles. Centaur boosts its satellite payload to geosynchronous orbit or, in the case of an interplanetary space probe, to or near to escape velocity...
with a 5.4 m (17.7 ft) diameter payload fairing
Payload fairing
Payload fairing is one of the main components of a launch vehicle. The fairing protects the payload during the ascent against the impact of the atmosphere . More recently, an additional function is to maintain the cleanroom environment for precision instruments.Outside the atmosphere the fairing is...
. This vehicle is capable of launching up to 17597 lb (7,981.9 kg) to geostationary transfer orbit
Geostationary transfer orbit
A geosynchronous transfer orbit or geostationary transfer orbit is a Hohmann transfer orbit used to reach geosynchronous or geostationary orbit....
. The Atlas V has also been used to launch the Mars Reconnaissance Orbiter
Mars Reconnaissance Orbiter
Mars Reconnaissance Orbiter is a NASA multipurpose spacecraft designed to conduct reconnaissance and Exploration of Mars from orbit...
and the New Horizons
New Horizons
New Horizons is a NASA robotic spacecraft mission currently en route to the dwarf planet Pluto. It is expected to be the first spacecraft to fly by and study Pluto and its moons, Charon, Nix, Hydra and S/2011 P 1. Its estimated arrival date at the Pluto-Charon system is July 14th, 2015...
probe.
The first and second stage along with the solid rocket motors were stacked on October 9, 2011 near the launch pad. The fairing containing MSL was transported to the launch pad on November 3, 2011.
Landing system


Parachute
A parachute is a device used to slow the motion of an object through an atmosphere by creating drag, or in the case of ram-air parachutes, aerodynamic lift. Parachutes are usually made out of light, strong cloth, originally silk, now most commonly nylon...
s and aerobraking
Aerobraking
Aerobraking is a spaceflight maneuver that reduces the high point of an elliptical orbit by flying the vehicle through the atmosphere at the low point of the orbit . The resulting drag slows the spacecraft...
alone to be effective. Although some previous missions have used airbags to cushion the shock of landing, the MSL is too large for this to be an option.
Curiosity will be set down on the Martian surface using a new high-precision entry, descent, and landing (EDL) system that will place it within a 20 km (12.4 mi) landing ellipse, in contrast to the 150 by landing ellipse of the landing systems used by the Mars Exploration Rovers.
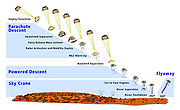
For this, the MSL will employ a combination of several systems in a precise order, where the entry, descent and landing sequence will break down into four parts.
- Guided entry: The rover is folded up within an aeroshellAeroshellAn aeroshell is a rigid heat-shielded shell that protects a vehicle from pressure and heat created by drag during atmospheric entry , slows it down during entry, and may protect it from debris during spaceflight...
which protects it during the travel through space and during the atmospheric entryAtmospheric reentryAtmospheric entry is the movement of human-made or natural objects as they enter the atmosphere of a celestial body from outer space—in the case of Earth from an altitude above the Kármán Line,...
at Mars. Atmospheric entry is accomplished using a Phenolic Impregnated Carbon Ablator (PICA) heat shield. The 4.5 m (14.8 ft) diameter heat shield, which will be the largest heat shield ever flown in space, reduces the velocity of the spacecraft by ablation against the Martian atmosphere, from the interplanetary transit velocity of 5.3 km/s down to approximately MachMach numberMach number is the speed of an object moving through air, or any other fluid substance, divided by the speed of sound as it is in that substance for its particular physical conditions, including those of temperature and pressure...
-2, where parachute deployment is possible. Much of the reduction of the landing precision error is accomplished by an entry guidance algorithm, similar to that used by the astronauts returning to Earth in the Apollo space program. This guidance uses the lifting force experienced by the aeroshell to "fly out" any detected error in range and thereby arrive at the targeted landing site. In order for the aeroshell to have lift, its center of mass is offset from the axial centerline which results in an off-center trim angle in atmospheric flight, again similar to the Apollo Command Module. This is accomplished by a series of ejectable ballast masses. The lift vector is controlled by four sets of two Reaction Control SystemReaction control systemA reaction control system is a subsystem of a spacecraft whose purpose is attitude control and steering by the use of thrusters. An RCS system is capable of providing small amounts of thrust in any desired direction or combination of directions. An RCS is also capable of providing torque to allow...
(RCS) thrusters that produce approximately 500 N of thrust per pair. This ability to change the pointing of the direction of lift allows the spacecraft to react to the ambient environment, and steer toward the landing zone. Prior to parachute deployment the entry vehicle must first eject the ballast mass such that the center of gravityCenter of gravityIn physics, a center of gravity of a material body is a point that may be used for a summary description of gravitational interactions. In a uniform gravitational field, the center of mass serves as the center of gravity...
offset is removed. Parachute will deploy at about 10 km (6.2 mi) altitude at about 470 m/s. - Parachute descent: When the entry phase is complete and the capsule has slowed to Mach 2 and at about 7 km altitude, the heat shield will separate and fall away. The Mars Science Laboratory will then deploy a supersonic parachuteParachuteA parachute is a device used to slow the motion of an object through an atmosphere by creating drag, or in the case of ram-air parachutes, aerodynamic lift. Parachutes are usually made out of light, strong cloth, originally silk, now most commonly nylon...
, as was done by previous landers such as VikingViking programThe Viking program consisted of a pair of American space probes sent to Mars, Viking 1 and Viking 2. Each spacecraft was composed of two main parts, an orbiter designed to photograph the surface of Mars from orbit, and a lander designed to study the planet from the surface...
, Mars PathfinderMars PathfinderMars Pathfinder was an American spacecraft that landed a base station with roving probe on Mars in 1997. It consisted of a lander, renamed the Carl Sagan Memorial Station, and a lightweight wheeled robotic rover named Sojourner.Launched on December 4, 1996 by NASA aboard a Delta II booster a...
and the Mars Exploration Rovers. In March and April 2009, the parachute for the MSL was tested in the world's largest wind tunnel and passed flight-qualification testing. The parachute has 80 suspension lines, is over 165 feet (50 meters) long, and is about 51 feet (16 meters) in diameter. The parachute is capable of being deployed at Mach 2.2 and can generate up to 289 kN (65,000 pounds) of drag force in the Martian atmosphere. A camera on the bottom of the rover will acquire 5 frames/min below 3.7 km. - Powered descent: Following the parachute braking, at about 1.8 km altitude, still travelling at about 100 m/s, the rover and descent stage drop out of the aeroshell. The descent stage is a platform above the rover with variable thrust mono propellant hydrazineHydrazineHydrazine is an inorganic compound with the formula N2H4. It is a colourless flammable liquid with an ammonia-like odor. Hydrazine is highly toxic and dangerously unstable unless handled in solution. Approximately 260,000 tons are manufactured annually...
rocket thrusters on arms extending around this platform to slow the descent. Each of the 8 rockets on this stage produce up to 3.1 kN (700 pounds) of thrust and were derived from those used on the Viking landersViking programThe Viking program consisted of a pair of American space probes sent to Mars, Viking 1 and Viking 2. Each spacecraft was composed of two main parts, an orbiter designed to photograph the surface of Mars from orbit, and a lander designed to study the planet from the surface...
. Meanwhile, the rover will transform from its stowed flight configuration to a landing configuration while being lowered beneath the descent stage by the "sky crane" system. - Sky crane: The sky crane system will lower the rover to a soft landing –wheels down– on the surface of Mars. This consists of 3 bridles lowering the rover and an umbilical cable carrying electrical signals between the descent stage and rover. At roughly 7.5 m (24.6 ft) below the descent stage the sky crane system slows to a halt and the rover touches down. After the rover touches down it waits 2 seconds to confirm that it is on solid ground and fires several pyrosPyrotechnicsPyrotechnics is the science of using materials capable of undergoing self-contained and self-sustained exothermic chemical reactions for the production of heat, light, gas, smoke and/or sound...
(small explosive devices) activating cable cutters on the bridle and umbilical cords to free itself from the descent stage. The descent stage promptly flies away to a crash landing, and the rover gets ready to roam Mars. The planned sky crane powered descent landing system has never been used in actual missions before.
Location and characteristics
Based on rankings of the proposed sites by investigators working on the project, the Gale Crater was selected by NASA administrators as the landing site. Within Gale Crater is a mountain of layered rocks, rising about 5 km (3.1 mi) above the crater floor, that Curiosity will investigate. The landing site (marked by the yellow ellipse in the image) is a smooth region inside the crater in front of the mountain. The landing site is elliptical, 20 by. Gale Crater diameter is 154 km (95.7 mi).The landing site contains material washed down from the wall of the crater, which will provide scientists with the opportunity to investigate the rocks that form the bedrock in this area. The landing ellipse also contains a rock type that is very dense and very bright colored; it is unlike any rock type previously investigated on Mars. It may be an ancient playa lake deposit, and it will likely be the mission's first target in checking for the presence of organic molecules.
However, the area of top scientific interest for Curiosity lies at the base of the mound, just at the edge of the landing ellipse and beyond a dark dune field. Here, orbiting instruments have detected signatures of both clay minerals and sulfate salts
. Scientists studying Mars have several hypotheses about how these minerals reflect changes in the Martian environment, particularly changes in the amount of water on the surface of Mars. The rover will use its full instrument suite to study these minerals and how they formed. These rocks are also a prime target in checking for organic molecules, since these environments may have been able to support microbial life.
Two canyons were cut in the mound through the layers containing clay minerals and sulfate salts after deposition of the layers. These canyons expose layers of rock representing tens or hundreds of millions of years of environmental change. Curiosity may be able to investigate these layers in the canyon closest to the landing ellipse, gaining access to a long history of environmental change on the planet. The canyons also contain sediment
Sediment
Sediment is naturally occurring material that is broken down by processes of weathering and erosion, and is subsequently transported by the action of fluids such as wind, water, or ice, and/or by the force of gravity acting on the particle itself....
that was transported by the water that cut the canyons
. This sediment interacted with the water, and the environment at that time may have been habitable. Thus, the rocks deposited at the mouth of the canyon closest to the landing ellipse form the third target in the search for organic molecules.
Selection criteria
The essential issue when selecting an optimum landing site is to identify a particular geologic environment, or set of environments, that would support microbial life. To mitigate the risk of disappointment and ensure the greatest chance for science success, interest is placed at the greatest number of possible science objectives at a chosen landing site. Thus, a landing site with morphologic and mineralogic evidence for past water, is better than a site with just one of these criteria. Furthermore, a site with spectra indicating multiple hydrated mineralsMineral hydration
Mineral hydration is an inorganic chemical reaction where water is added to the crystal structure of a mineral, usually creating a new mineral, usually called a hydrate....
is preferred; clay minerals
Clay minerals
Clay minerals are hydrous aluminium phyllosilicates, sometimes with variable amounts of iron, magnesium, alkali metals, alkaline earths, and other cations. Clays have structures similar to the micas and therefore form flat hexagonal sheets. Clay minerals are common weathering products and low...
and sulfate
Sulfate
In inorganic chemistry, a sulfate is a salt of sulfuric acid.-Chemical properties:...
salts would constitute a rich site. Hematite
Hematite
Hematite, also spelled as haematite, is the mineral form of iron oxide , one of several iron oxides. Hematite crystallizes in the rhombohedral system, and it has the same crystal structure as ilmenite and corundum...
, other iron oxide
Iron oxide
Iron oxides are chemical compounds composed of iron and oxygen. All together, there are sixteen known iron oxides and oxyhydroxides.Iron oxides and oxide-hydroxides are widespread in nature, play an important role in many geological and biological processes, and are widely utilized by humans, e.g.,...
s, sulfate minerals, silicate minerals
Silicate minerals
The silicate minerals make up the largest and most important class of rock-forming minerals, constituting approximately 90 percent of the crust of the Earth. They are classified based on the structure of their silicate group...
, silica
Silicon dioxide
The chemical compound silicon dioxide, also known as silica , is an oxide of silicon with the chemical formula '. It has been known for its hardness since antiquity...
, and possibly chloride
Chloride
The chloride ion is formed when the element chlorine, a halogen, picks up one electron to form an anion Cl−. The salts of hydrochloric acid HCl contain chloride ions and can also be called chlorides. The chloride ion, and its salts such as sodium chloride, are very soluble in water...
minerals have all been suggested as possible substrates for fossil preservation. Indeed, all are known to facilitate the preservation of fossil morphologies and molecules on Earth. Difficult terrain is the best candidate for finding evidence of livable conditions, and engineers must be sure the rover can safely reach the site and drive within it.
Current engineering constraints call for a landing site less than 45° from the Martian equator, and less than 1 km above the reference datum. At the first MSL Landing Site workshop, 33 potential landing sites were identified. By the second workshop in late 2007, the list had grown to include almost 50 sites, and by the end of the workshop, the list was reduced to six; in November 2008, project leaders at a third workshop reduced the list to these four landing sites:
| Name | Location | Elevation | Notes |
|---|---|---|---|
| Eberswalde Crater Delta | 23.86°S 326.73°E | -1450 m | Ancient river delta. |
| Holden Crater Holden (Martian crater) Holden is a 140 km wide crater on Mars, located with the southern highlands. It is named after Edward Singleton Holden, an American astronomer, and the founder of the Astronomical Society of the Pacific.... Fan |
26.37°S 325.10°E | −1940 m | Dry lake bed. |
| Gale Crater | 4.49°S 137.42°E | -4451 m | Features a 5-kilometer-tall mountain of layered material near center. Selected. |
| Mawrth Vallis Mawrth Vallis Mawrth Vallis is a valley on Mars at 22.3°N, 343.5°E with an elevation approximately two kilometres below datum. It is an ancient water outflow channel with light-colored clay-rich rocks.Mawrth Vallis is one of the oldest valleys on Mars... Site 2 |
24.01°N 341.03°E | -2246 m | Channel carved by catastrophic floods. |
On August 20, 2009, NASA sent out a call for additional landing site proposals and issued another request for proposals on November 16, 2010. A fourth landing site workshop was held in late September 2010. A fifth and final workshop took place during May 16–18, 2011.
On July 22, 2011, it was announced that Gale Crater
Gale (crater)
Gale is a crater on Mars, near the border of the lowlands of Elysium Planitia at . It is 154 km in diameter and believed to be about 3.5 to 3.8 billion years old...
had been selected as the landing site of the Mars Science Laboratory mission.
See also
- ExoMars landerExoMarsExoMars is a European-led robotic mission to Mars currently under development by the European Space Agency with collaboration by NASA...
- Exploration of MarsExploration of MarsThe exploration of Mars has been an important part of the space exploration programs of the Soviet Union, the United States, Europe, and Japan. Dozens of robotic spacecraft, including orbiters, landers, and rovers, have been launched toward Mars since the 1960s...
- Life on MarsLife on MarsScientists have long speculated about the possibility of life on Mars owing to the planet's proximity and similarity to Earth. Fictional Martians have been a recurring feature of popular entertainment of the 20th and 21st centuries, but it remains an open question whether life currently exists on...
- Mars roverMars RoverA Mars rover is an automated motor vehicle which propels itself across the surface of the planet Mars after landing.Rovers have several advantages over stationary landers: they examine more territory, they can be directed to interesting features, they can place themselves in sunny positions to...
- MAX-C roverMars Astrobiology Explorer-CacherThe Mars Astrobiology Explorer-Cacher was a NASA concept for a Mars rover mission, proposed to be launched in 2018 together with the European ExoMars rover...
- AstrobiologyAstrobiologyAstrobiology is the study of the origin, evolution, distribution, and future of life in the universe. This interdisciplinary field encompasses the search for habitable environments in our Solar System and habitable planets outside our Solar System, the search for evidence of prebiotic chemistry,...
Further reading
External links
- MSL Home Page
- MSL – Actual Launch (10:02 am EST/usa, November 26, 2011 – Recorded Video (04:00)
- MSL – Mission Summary – Animated/Extended Video (11:20)
- MSL – Entry, Descent & Landing (EDL) – Animated Video (02:00)
- MSL – Gale Crater Landing Site – Animated/Narrated Video (02:37)
- MSL – NASA/JPL News Channel Videos
- MSL – NASA/JPL Virtual Tour – Rover
- MSL – Construction – Recorded Video
- Send Your Name To Mars
- MSL – Demo, reported by The Planetary Society.
- MSL – Entry, Descent & Landing (EDL) – Description. (PDF)
- ChemCam Mounted with LIBS for Classifying Carbonate Minerals on Mars (PDF)
- MSL Press Kit
- Spherical panorama of Curiosity in the HPSF at KSC - August 12, 2011
- Spherical panorama of the 'Skycrane' landing system for Curiosity in the HPSF at KSC - August 12, 2011
- Spherical panorama of the Aeroshell for Curiosity in the HPSF at KSC - August 12, 2011