

Servomechanism
Encyclopedia
A servomechanism, sometimes shortened to servo, is an automatic device that uses error-sensing negative feedback
to correct the performance of a mechanism.
The term correctly applies only to systems where the feedback
or error-correction signals help control mechanical position, speed or other parameters. For example, an automotive power window control is not a servomechanism, as there is no automatic feedback that controls position—the operator does this by observation. By contrast the car's cruise control
uses closed loop feedback
, which classifies it as a servomechanism.
as the primary means of creating mechanical force
. Other types of servos use hydraulics
, pneumatics
, or magnetic principles. Servos operate on the principle of negative feedback, where the control input is compared to the actual position of the mechanical system as measured by some sort of transducer
at the output. Any difference between the actual and wanted values (an "error signal") is amplified (and converted) and used to drive the system in the direction necessary to reduce or eliminate the error. This procedure is one widely used application of control theory
.
is another type of servomechanism. The steam engine
uses mechanical governors; another early application was to govern the speed of water wheels. Prior to World War II the constant speed propeller
was developed to control engine speed for maneuvering aircraft. Fuel controls for gas turbine
engines employ either hydromechanical or electronic governing.
systems in aircraft
which use servos to actuate the aircraft's control surfaces, and radio-controlled model
s which use RC servos for the same purpose. Many autofocus
cameras also use a servomechanism to accurately move the lens, and thus adjust the focus. A modern hard disk drive has a magnetic servo system with sub-micrometre positioning accuracy. In industrial machines, servos are used to perform complex motion.
or a linear motor
to give linear motion.
is one type of servomotor. A stepper motor is actually built to move angular positions based upon each possible step around the entire rotation, and may include microsteps with a resolution such as 256 microsteps per step of the stepper motor. A servomechanism may or may not use a servomotor. For example, a household furnace controlled by a thermostat is a servomechanism, because of the feedback and resulting error signal, yet there is no motor being controlled directly by the servomechanism.
s to amplify the steering
or braking
force
applied by the driver. However, these devices are not true servos, but rather mechanical amplifier
s. (See also Power steering
or Vacuum servo
.)
's steam engine
governor
is generally considered the first powered feedback system. The windmill fantail
is an earlier example of automatic control, but since it does not have an amplifier
or gain
, it is not usually considered a servomechanism.
The first feedback position control device was the ship steering engine
, used to position the rudder of large ships based on the position of the ship's wheel. This technology was first used on the SS Great Eastern
in 1866. Steam steering engines had the characteristics of a modern servomechanism: an input, an output, an error signal, and a means for amplifying the error signal used for negative feedback to drive the error towards zero. The Ragonnet power reverse mechanism was a general purpose air or steam-powered servo amplifier for linear motion patented in 1909.
Electrical servomechanisms require a power amplifier. World War II
saw the development of electrical fire-control servomechanisms, using an amplidyne
as the power amplifier. Vacuum tube
amplifiers were used in the UNISERVO
tape drive for the UNIVAC I
computer. The Royal Navy began experimenting with Remote Power Control (RPC) on HMS Champion
in 1928 and began using RPC to control searchlights in the early 1930s. During WW2 RPC was used to control gun mounts and gun directors.
Modern servomechanisms use solid state power amplifiers, usually built from MOSFET
or thyristor
devices. Small servos may use power transistor
s.
The origin of the word is believed to come from the French "Le Servomoteur" or the slavemotor, first used by J. J. L. Farcot in 1868 to describe hydraulic and steam engines for use in ship steering.
The simplest kind of servos use bang–bang control.
More complex control systems use proportional control, PID control,
and state space control, which are studied in modern control theory.
 RC servos are hobbyist remote control devices servos typically employed in
RC servos are hobbyist remote control devices servos typically employed in
radio-controlled model
s, where they are used to provide actuation
for various mechanical systems such as the steering of a car, the control surfaces on a plane, or the rudder of a boat.
Due to their affordability, reliability, and simplicity of control by microprocessors, RC servos are often used in small-scale robotics
applications.
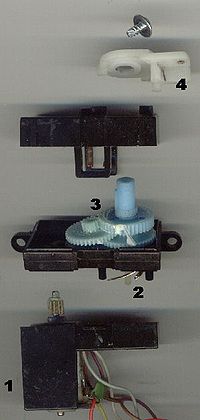
RC servos are composed of an electric motor mechanically linked to a potentiometer. A standard RC receiver sends pulse-width modulation
(PWM) signals to the servo. The electronics inside the servo translate the width of the pulse into a position. When the servo is commanded to rotate, the motor is powered until the potentiometer reaches the value corresponding to the commanded position.
RC servos use a three-pin 0.1" spacing jack (female) which mates to standard 0.025" square pins. The most common order is signal, +voltage, ground. The standard voltage is 4.8 V DC, however 6 V and 12 V has also been seen for a few servos. The control signal is a digital PWM signal with a 50 Hz frame rate. Within each 20 ms timeframe, an active-high digital pulse controls the position. The pulse nominally ranges from 1.0 ms to 2.0 ms with 1.5 ms always being center of range. Pulse widths outside this range can be used for "overtravel" -moving the servo beyond its normal range. This PWM signal is sometimes (incorrectly) called Pulse Position Modulation (PPM).
The servo is controlled by three wires: ground, power, and control. The servo will move based on the pulses sent over the control wire, which set the angle of the actuator arm. The servo expects a pulse every 20 ms in order to gain correct information about the angle. The width of the servo pulse dictates the range of the servo's angular motion.
A servo pulse of 1.5 ms width will typically set the servo to its "neutral" position or 45°, a pulse of 1.25 ms could set it to 0° and a pulse of 1.75 ms to 90°. The physical limits and timings of the servo hardware varies between brands and models, but a general servo's angular motion will travel somewhere in the range of 90° - 120° and the neutral position is almost always at 1.5 ms. This is the "standard pulse servo mode" used by all hobby analog servos.
A hobby digital servo is controlled by the same "standard pulse servo mode" pulses as an analog servo. Some hobby digital servos can be set to another mode that allows a robot controller to read back the actual position of the servo shaft. Some hobby digital servos can optionally be set to another mode and "programmed", so it has the desired PID controller
characteristics when it is later driven by a standard RC receiver.
RC servos are usually powered by the receiver which in turn is powered by battery packs or an electronic speed control
ler (ESC) with an integrated or a separate battery eliminator circuit
(BEC). Common battery packs are either NiCd
, NiMH or lithium-ion polymer battery (LiPo) type. Voltage ratings vary, but most receivers are operated at 5 V or 6 V.
Negative feedback
Negative feedback occurs when the output of a system acts to oppose changes to the input of the system, with the result that the changes are attenuated. If the overall feedback of the system is negative, then the system will tend to be stable.- Overview :...
to correct the performance of a mechanism.
The term correctly applies only to systems where the feedback
Feedback
Feedback describes the situation when output from an event or phenomenon in the past will influence an occurrence or occurrences of the same Feedback describes the situation when output from (or information about the result of) an event or phenomenon in the past will influence an occurrence or...
or error-correction signals help control mechanical position, speed or other parameters. For example, an automotive power window control is not a servomechanism, as there is no automatic feedback that controls position—the operator does this by observation. By contrast the car's cruise control
Cruise control
Cruise control is a system that automatically controls the speed of a motor vehicle. The system takes over the throttle of the car to maintain a steady speed as set by the driver.-History:...
uses closed loop feedback
Control theory
Control theory is an interdisciplinary branch of engineering and mathematics that deals with the behavior of dynamical systems. The desired output of a system is called the reference...
, which classifies it as a servomechanism.
Position control
A common type of servo provides position control. Servos are commonly electrical or partially electronic in nature, using an electric motorElectric motor
An electric motor converts electrical energy into mechanical energy.Most electric motors operate through the interaction of magnetic fields and current-carrying conductors to generate force...
as the primary means of creating mechanical force
Force
In physics, a force is any influence that causes an object to undergo a change in speed, a change in direction, or a change in shape. In other words, a force is that which can cause an object with mass to change its velocity , i.e., to accelerate, or which can cause a flexible object to deform...
. Other types of servos use hydraulics
Hydraulics
Hydraulics is a topic in applied science and engineering dealing with the mechanical properties of liquids. Fluid mechanics provides the theoretical foundation for hydraulics, which focuses on the engineering uses of fluid properties. In fluid power, hydraulics is used for the generation, control,...
, pneumatics
Pneumatics
Pneumatics is a branch of technology, which deals with the study and application of use of pressurized gas to effect mechanical motion.Pneumatic systems are extensively used in industry, where factories are commonly plumbed with compressed air or compressed inert gases...
, or magnetic principles. Servos operate on the principle of negative feedback, where the control input is compared to the actual position of the mechanical system as measured by some sort of transducer
Transducer
A transducer is a device that converts one type of energy to another. Energy types include electrical, mechanical, electromagnetic , chemical, acoustic or thermal energy. While the term transducer commonly implies the use of a sensor/detector, any device which converts energy can be considered a...
at the output. Any difference between the actual and wanted values (an "error signal") is amplified (and converted) and used to drive the system in the direction necessary to reduce or eliminate the error. This procedure is one widely used application of control theory
Control theory
Control theory is an interdisciplinary branch of engineering and mathematics that deals with the behavior of dynamical systems. The desired output of a system is called the reference...
.
Speed control
Speed control via a governorGovernor (device)
A governor, or speed limiter, is a device used to measure and regulate the speed of a machine, such as an engine. A classic example is the centrifugal governor, also known as the Watt or fly-ball governor, which uses a rotating assembly of weights mounted on arms to determine how fast the engine...
is another type of servomechanism. The steam engine
Steam engine
A steam engine is a heat engine that performs mechanical work using steam as its working fluid.Steam engines are external combustion engines, where the working fluid is separate from the combustion products. Non-combustion heat sources such as solar power, nuclear power or geothermal energy may be...
uses mechanical governors; another early application was to govern the speed of water wheels. Prior to World War II the constant speed propeller
Constant speed propeller
A constant speed propeller is a type of propeller that can change its blade pitch to take better advantage of the power supplied by an engine in much the same way that a transmission in a car takes better advantage of its power source...
was developed to control engine speed for maneuvering aircraft. Fuel controls for gas turbine
Gas turbine
A gas turbine, also called a combustion turbine, is a type of internal combustion engine. It has an upstream rotating compressor coupled to a downstream turbine, and a combustion chamber in-between....
engines employ either hydromechanical or electronic governing.
Other
Positioning servomechanisms were first used in military fire-control and marine navigation equipment. Today servomechanisms are used in automatic machine tools, satellite-tracking antennas, remote control airplanes, automatic navigation systems on boats and planes, and antiaircraft-gun control systems. Other examples are fly-by-wireFly-by-wire
Fly-by-wire is a system that replaces the conventional manual flight controls of an aircraft with an electronic interface. The movements of flight controls are converted to electronic signals transmitted by wires , and flight control computers determine how to move the actuators at each control...
systems in aircraft
Aircraft
An aircraft is a vehicle that is able to fly by gaining support from the air, or, in general, the atmosphere of a planet. An aircraft counters the force of gravity by using either static lift or by using the dynamic lift of an airfoil, or in a few cases the downward thrust from jet engines.Although...
which use servos to actuate the aircraft's control surfaces, and radio-controlled model
Radio-controlled model
A radio-controlled model is a model that is steerable with the use of radio control. All types of vehicles imaginable have had RC systems installed in them, including cars, boats, planes, and even helicopters and scale railway locomotives....
s which use RC servos for the same purpose. Many autofocus
Autofocus
An autofocus optical system uses a sensor, a control system and a motor to focus fully automatic or on a manually selected point or area. An electronic rangefinder has a display instead of the motor; the adjustment of the optical system has to be done manually until indication...
cameras also use a servomechanism to accurately move the lens, and thus adjust the focus. A modern hard disk drive has a magnetic servo system with sub-micrometre positioning accuracy. In industrial machines, servos are used to perform complex motion.
Rotary or linear
Typical servos give a rotary (angular) output. Linear types are common as well, using a leadscrewLeadscrew
A leadscrew , also known as a power screw or translation screw, is a screw designed to translate turning motion into linear motion...
or a linear motor
Linear motor
A linear motor is an electric motor that has had its stator and rotor "unrolled" so that instead of producing a torque it produces a linear force along its length...
to give linear motion.
Servomotor
A servomotor is a motor which forms part of a servomechanism. The servomotor is paired with some type of encoder to provide position/speed feedback. A stepper motorStepper motor
A stepper motor is a brushless, electric motor that can divide a full rotation into a large number of steps. The motor's position can be controlled precisely without any feedback mechanism , as long as the motor is carefully sized to the application...
is one type of servomotor. A stepper motor is actually built to move angular positions based upon each possible step around the entire rotation, and may include microsteps with a resolution such as 256 microsteps per step of the stepper motor. A servomechanism may or may not use a servomotor. For example, a household furnace controlled by a thermostat is a servomechanism, because of the feedback and resulting error signal, yet there is no motor being controlled directly by the servomechanism.
Devices without feedback
Another device commonly referred to as a servo is used in automobileAutomobile
An automobile, autocar, motor car or car is a wheeled motor vehicle used for transporting passengers, which also carries its own engine or motor...
s to amplify the steering
Power steering
Power steering helps drivers steer vehicles by augmenting steering effort of the steering wheel.Hydraulic or electric actuators add controlled energy to the steering mechanism, so the driver needs to provide only modest effort regardless of conditions. Power steering helps considerably when a...
or braking
Brake
A brake is a mechanical device which inhibits motion. Its opposite component is a clutch. The rest of this article is dedicated to various types of vehicular brakes....
force
Force
In physics, a force is any influence that causes an object to undergo a change in speed, a change in direction, or a change in shape. In other words, a force is that which can cause an object with mass to change its velocity , i.e., to accelerate, or which can cause a flexible object to deform...
applied by the driver. However, these devices are not true servos, but rather mechanical amplifier
Amplifier
Generally, an amplifier or simply amp, is a device for increasing the power of a signal.In popular use, the term usually describes an electronic amplifier, in which the input "signal" is usually a voltage or a current. In audio applications, amplifiers drive the loudspeakers used in PA systems to...
s. (See also Power steering
Power steering
Power steering helps drivers steer vehicles by augmenting steering effort of the steering wheel.Hydraulic or electric actuators add controlled energy to the steering mechanism, so the driver needs to provide only modest effort regardless of conditions. Power steering helps considerably when a...
or Vacuum servo
Vacuum servo
A vacuum servo is a component used on motor vehicles in their braking system, to provide assistance to the driver by decreasing the braking effort. In the USA it is commonly called a brake booster.-Background:...
.)
History
James WattJames Watt
James Watt, FRS, FRSE was a Scottish inventor and mechanical engineer whose improvements to the Newcomen steam engine were fundamental to the changes brought by the Industrial Revolution in both his native Great Britain and the rest of the world.While working as an instrument maker at the...
's steam engine
Steam engine
A steam engine is a heat engine that performs mechanical work using steam as its working fluid.Steam engines are external combustion engines, where the working fluid is separate from the combustion products. Non-combustion heat sources such as solar power, nuclear power or geothermal energy may be...
governor
Governor (device)
A governor, or speed limiter, is a device used to measure and regulate the speed of a machine, such as an engine. A classic example is the centrifugal governor, also known as the Watt or fly-ball governor, which uses a rotating assembly of weights mounted on arms to determine how fast the engine...
is generally considered the first powered feedback system. The windmill fantail
Windmill fantail
A Fantail is a small windmill mounted at right angles to the sails, at the rear of the windmill, and which turns the cap automatically to bring it into the wind. The fantail was patented in 1745 by Edmund Lee, a blacksmith working at Brockmill Forge near Wigan, England, and perfected on mills...
is an earlier example of automatic control, but since it does not have an amplifier
Amplifier
Generally, an amplifier or simply amp, is a device for increasing the power of a signal.In popular use, the term usually describes an electronic amplifier, in which the input "signal" is usually a voltage or a current. In audio applications, amplifiers drive the loudspeakers used in PA systems to...
or gain
Gain
In electronics, gain is a measure of the ability of a circuit to increase the power or amplitude of a signal from the input to the output. It is usually defined as the mean ratio of the signal output of a system to the signal input of the same system. It may also be defined on a logarithmic scale,...
, it is not usually considered a servomechanism.
The first feedback position control device was the ship steering engine
Steering engine
A steering engine is a power steering device for ships.-History:The first steering engine with feedback was installed on Isambard Kingdom Brunel's SS Great Eastern in 1866....
, used to position the rudder of large ships based on the position of the ship's wheel. This technology was first used on the SS Great Eastern
SS Great Eastern
SS Great Eastern was an iron sailing steam ship designed by Isambard Kingdom Brunel, and built by J. Scott Russell & Co. at Millwall on the River Thames, London. She was by far the largest ship ever built at the time of her 1858 launch, and had the capacity to carry 4,000 passengers around the...
in 1866. Steam steering engines had the characteristics of a modern servomechanism: an input, an output, an error signal, and a means for amplifying the error signal used for negative feedback to drive the error towards zero. The Ragonnet power reverse mechanism was a general purpose air or steam-powered servo amplifier for linear motion patented in 1909.
Electrical servomechanisms require a power amplifier. World War II
World War II
World War II, or the Second World War , was a global conflict lasting from 1939 to 1945, involving most of the world's nations—including all of the great powers—eventually forming two opposing military alliances: the Allies and the Axis...
saw the development of electrical fire-control servomechanisms, using an amplidyne
Amplidyne
An amplidyne is an electromechanical amplifier invented during World War II by Ernst Alexanderson. It is usually an AC motor driving a DC generator with modifications to increase the power gain available...
as the power amplifier. Vacuum tube
Vacuum tube
In electronics, a vacuum tube, electron tube , or thermionic valve , reduced to simply "tube" or "valve" in everyday parlance, is a device that relies on the flow of electric current through a vacuum...
amplifiers were used in the UNISERVO
UNISERVO
The UNISERVO tape drive was the primary I/O device on the UNIVAC I computer. Its place in history is assured as it was the first tape drive for a commercially sold computer....
tape drive for the UNIVAC I
UNIVAC I
The UNIVAC I was the first commercial computer produced in the United States. It was designed principally by J. Presper Eckert and John Mauchly, the inventors of the ENIAC...
computer. The Royal Navy began experimenting with Remote Power Control (RPC) on HMS Champion
HMS Champion (1915)
HMS Champion was a C-class light cruiser of the British Royal Navy.Eight light cruisers were ordered for the Royal Navy in the 1913 budget. The six ships of the Caroline class used conventional direct drive turbine engines but two, Champion and Calliope had experimental engine designs using geared...
in 1928 and began using RPC to control searchlights in the early 1930s. During WW2 RPC was used to control gun mounts and gun directors.
Modern servomechanisms use solid state power amplifiers, usually built from MOSFET
MOSFET
The metal–oxide–semiconductor field-effect transistor is a transistor used for amplifying or switching electronic signals. The basic principle of this kind of transistor was first patented by Julius Edgar Lilienfeld in 1925...
or thyristor
Thyristor
A thyristor is a solid-state semiconductor device with four layers of alternating N and P-type material. They act as bistable switches, conducting when their gate receives a current trigger, and continue to conduct while they are forward biased .Some sources define silicon controlled rectifiers and...
devices. Small servos may use power transistor
Transistor
A transistor is a semiconductor device used to amplify and switch electronic signals and power. It is composed of a semiconductor material with at least three terminals for connection to an external circuit. A voltage or current applied to one pair of the transistor's terminals changes the current...
s.
The origin of the word is believed to come from the French "Le Servomoteur" or the slavemotor, first used by J. J. L. Farcot in 1868 to describe hydraulic and steam engines for use in ship steering.
The simplest kind of servos use bang–bang control.
More complex control systems use proportional control, PID control,
and state space control, which are studied in modern control theory.
RC servos
radio-controlled model
Radio-controlled model
A radio-controlled model is a model that is steerable with the use of radio control. All types of vehicles imaginable have had RC systems installed in them, including cars, boats, planes, and even helicopters and scale railway locomotives....
s, where they are used to provide actuation
Actuation
*High Redundancy Actuation is a new approach to fault tolerant control in the area of mechanical actuation.*Variable valve actuation, or VVA, is a generalised term used to describe any mechanism or method that can alter the shape or timing of a valve lift event within an internal combustion...
for various mechanical systems such as the steering of a car, the control surfaces on a plane, or the rudder of a boat.
Due to their affordability, reliability, and simplicity of control by microprocessors, RC servos are often used in small-scale robotics
Robotics
Robotics is the branch of technology that deals with the design, construction, operation, structural disposition, manufacture and application of robots...
applications.
RC servos are composed of an electric motor mechanically linked to a potentiometer. A standard RC receiver sends pulse-width modulation
Pulse-width modulation
Pulse-width modulation , or pulse-duration modulation , is a commonly used technique for controlling power to inertial electrical devices, made practical by modern electronic power switches....
(PWM) signals to the servo. The electronics inside the servo translate the width of the pulse into a position. When the servo is commanded to rotate, the motor is powered until the potentiometer reaches the value corresponding to the commanded position.
RC servos use a three-pin 0.1" spacing jack (female) which mates to standard 0.025" square pins. The most common order is signal, +voltage, ground. The standard voltage is 4.8 V DC, however 6 V and 12 V has also been seen for a few servos. The control signal is a digital PWM signal with a 50 Hz frame rate. Within each 20 ms timeframe, an active-high digital pulse controls the position. The pulse nominally ranges from 1.0 ms to 2.0 ms with 1.5 ms always being center of range. Pulse widths outside this range can be used for "overtravel" -moving the servo beyond its normal range. This PWM signal is sometimes (incorrectly) called Pulse Position Modulation (PPM).
The servo is controlled by three wires: ground, power, and control. The servo will move based on the pulses sent over the control wire, which set the angle of the actuator arm. The servo expects a pulse every 20 ms in order to gain correct information about the angle. The width of the servo pulse dictates the range of the servo's angular motion.
A servo pulse of 1.5 ms width will typically set the servo to its "neutral" position or 45°, a pulse of 1.25 ms could set it to 0° and a pulse of 1.75 ms to 90°. The physical limits and timings of the servo hardware varies between brands and models, but a general servo's angular motion will travel somewhere in the range of 90° - 120° and the neutral position is almost always at 1.5 ms. This is the "standard pulse servo mode" used by all hobby analog servos.
A hobby digital servo is controlled by the same "standard pulse servo mode" pulses as an analog servo. Some hobby digital servos can be set to another mode that allows a robot controller to read back the actual position of the servo shaft. Some hobby digital servos can optionally be set to another mode and "programmed", so it has the desired PID controller
PID controller
A proportional–integral–derivative controller is a generic control loop feedback mechanism widely used in industrial control systems – a PID is the most commonly used feedback controller. A PID controller calculates an "error" value as the difference between a measured process variable and a...
characteristics when it is later driven by a standard RC receiver.
RC servos are usually powered by the receiver which in turn is powered by battery packs or an electronic speed control
Electronic speed control
An electronic speed control or ESC is an electronic circuit with the purpose to vary an electric motor's speed, its direction and possibly also to act as a dynamic brake...
ler (ESC) with an integrated or a separate battery eliminator circuit
Battery eliminator circuit
A battery eliminator circuit is an electronic circuit designed to deliver electrical power to other circuitry without the need for a battery. Historically the expression was sometimes used to describe devices used to power battery-driven equipment from mains electricity...
(BEC). Common battery packs are either NiCd
Nickel-cadmium battery
The nickel–cadmium battery ' is a type of rechargeable battery using nickel oxide hydroxide and metallic cadmium as electrodes....
, NiMH or lithium-ion polymer battery (LiPo) type. Voltage ratings vary, but most receivers are operated at 5 V or 6 V.
See also
- Fractional horsepower motors
- Motion controlMotion controlMotion control is a sub-field of automation, in which the position or velocity of machines are controlled using some type of device such as a hydraulic pump, linear actuator, or an electric motor, generally a servo...
- Stepper motorStepper motorA stepper motor is a brushless, electric motor that can divide a full rotation into a large number of steps. The motor's position can be controlled precisely without any feedback mechanism , as long as the motor is carefully sized to the application...
– a similar brushless, synchronous electric motor that can divide a full rotation into a large number of steps - SynchroSynchroA synchro is a type of rotary electrical transformer that is used for measuring the angle of a rotating machine such as an antenna platform. In its general physical construction, it is much like an electric motor...
, a form of transmitter and receiver motor used in servomechanisms