

Convex polytope
Encyclopedia
Polytope
In elementary geometry, a polytope is a geometric object with flat sides, which exists in any general number of dimensions. A polygon is a polytope in two dimensions, a polyhedron in three dimensions, and so on in higher dimensions...
, having the additional property that it is also a convex set
Convex set
In Euclidean space, an object is convex if for every pair of points within the object, every point on the straight line segment that joins them is also within the object...
of points in the n-dimensional space Rn. Some authors use the terms "convex polytope" and "convex polyhedron" interchangeably, while others prefer to draw a distinction between the notions of a polyhedron
Polyhedron
In elementary geometry a polyhedron is a geometric solid in three dimensions with flat faces and straight edges...
and a polytope.
In addition, some texts require a polytope to be a bounded set
Bounded set
In mathematical analysis and related areas of mathematics, a set is called bounded, if it is, in a certain sense, of finite size. Conversely, a set which is not bounded is called unbounded...
, while others (including this article) allow polytopes to be unbounded. The terms "bounded/unbounded convex polytope" will be used below whenever the boundedness is critical to the discussed issue. Yet other texts treat a convex n-polytope as a surface or (n-1)-manifold.
Convex polytopes play an important role both in various branches of mathematics
Mathematics
Mathematics is the study of quantity, space, structure, and change. Mathematicians seek out patterns and formulate new conjectures. Mathematicians resolve the truth or falsity of conjectures by mathematical proofs, which are arguments sufficient to convince other mathematicians of their validity...
and in applied areas, most notably in linear programming
Linear programming
Linear programming is a mathematical method for determining a way to achieve the best outcome in a given mathematical model for some list of requirements represented as linear relationships...
.
A comprehensive and influential book in the subject, called Convex Polytopes, was published in 1967 by Branko Grünbaum
Branko Grünbaum
Branko Grünbaum is a Croatian-born mathematician and a professor emeritus at the University of Washington in Seattle. He received his Ph.D. in 1957 from Hebrew University of Jerusalem in Israel....
. In 2003 the 2nd edition of the book was published, with significant additional material contributed by new writers.
In Grünbaum's book, and in some other texts in discrete geometry
Discrete geometry
Discrete geometry and combinatorial geometry are branches of geometry that study combinatorial properties and constructive methods of discrete geometric objects. Most questions in discrete geometry involve finite or discrete sets of basic geometric objects, such as points, lines, planes, circles,...
, convex polytopes are often simply called "polytopes". Grünbaum points out that this is solely to avoid the endless repetition of the word "convex", and that the discussion should throughout be understood as applying only to the convex variety.
A polytope is called full-dimensional, if it is an n-dimensional object in Rn.
Examples
- Many examples of bounded convex polytopes can be found in the article "polyhedronPolyhedronIn elementary geometry a polyhedron is a geometric solid in three dimensions with flat faces and straight edges...
". - In the 2-dimensional case the full-dimensional examples are a half-plane, a strip between two parallel lines, an angleAngleIn geometry, an angle is the figure formed by two rays sharing a common endpoint, called the vertex of the angle.Angles are usually presumed to be in a Euclidean plane with the circle taken for standard with regard to direction. In fact, an angle is frequently viewed as a measure of an circular arc...
shape (the intersection of two non-parallel half-planes), a shape defined by a convex polygonal chainPolygonal chainA polygonal chain, polygonal curve, polygonal path, or piecewise linear curve, is a connected series of line segments. More formally, a polygonal chain P is a curve specified by a sequence of points \scriptstyle called its vertices so that the curve consists of the line segments connecting the...
with two rays attached to its ends, and a convex polygonConvex polygonIn geometry, a polygon can be either convex or concave .- Convex polygons :A convex polygon is a simple polygon whose interior is a convex set...
. - Special cases of an unbounded convex polytope are a slab between two parallel hyperplanes, a wedge defined by two non-parallel half-spaceHalf-spaceIn geometry, a half-space is either of the two parts into which a plane divides the three-dimensional euclidean space. More generally, a half-space is either of the two parts into which a hyperplane divides an affine space...
s, a polyhedral cylinder (infinite prismPrism (geometry)In geometry, a prism is a polyhedron with an n-sided polygonal base, a translated copy , and n other faces joining corresponding sides of the two bases. All cross-sections parallel to the base faces are the same. Prisms are named for their base, so a prism with a pentagonal base is called a...
), and a polyhedral cone (infinite prismPrism (geometry)In geometry, a prism is a polyhedron with an n-sided polygonal base, a translated copy , and n other faces joining corresponding sides of the two bases. All cross-sections parallel to the base faces are the same. Prisms are named for their base, so a prism with a pentagonal base is called a...
), defined by three or more half-spaces passing through a common point.
Definitions
A convex polytope may be defined in a number of ways, depending on what is more suitable for the problem at hand. Grünbaum's definition is in terms of a convex set of points in space. Other important definitions are: as the intersectionIntersection (set theory)
In mathematics, the intersection of two sets A and B is the set that contains all elements of A that also belong to B , but no other elements....
of half-spaces (half-space representation) and as the convex hull
Convex hull
In mathematics, the convex hull or convex envelope for a set of points X in a real vector space V is the minimal convex set containing X....
of a set of points (vertex representation).
Vertex representation (Convex hull)
In his book Convex polytopes, Grünbaum defines a convex polytope as a compact convex set:- A set
 (where
(where  is real space) is convex if, for each pair of distinct points
is real space) is convex if, for each pair of distinct points  , the closed segment with endpoints a and b is contained within K.
, the closed segment with endpoints a and b is contained within K.
- A compact convex set
 is a polytope provided ext K (the set of all extreme pointExtreme pointIn mathematics, an extreme point of a convex set S in a real vector space is a point in S which does not lie in any open line segment joining two points of S...
is a polytope provided ext K (the set of all extreme pointExtreme pointIn mathematics, an extreme point of a convex set S in a real vector space is a point in S which does not lie in any open line segment joining two points of S...
s of K) is a finite set
This is equivalent to defining a finite convex polytope as the convex hull
Convex hull
In mathematics, the convex hull or convex envelope for a set of points X in a real vector space V is the minimal convex set containing X....
of a finite set of points, where the finite set must contain the set of extreme points of the polytope. Such a definition is called a vertex representation (V-representation or V-description). There exist infinitely many V-descriptions of a convex polytope. However, for a full-dimensional convex polytope, the minimal V-description is in fact unique and is given by the set of the vertices
Vertex (geometry)
In geometry, a vertex is a special kind of point that describes the corners or intersections of geometric shapes.-Of an angle:...
of the polytope.
Intersection of half-spaces
A convex polytope may be defined as an intersection of a finite number of half-spaces. Such definition is called a half-space representation (H-representation or H-description). There exist infinitely many H-descriptions of a convex polytope. However, for a full-dimensional convex polytope, the minimal H-description is in fact unique and is given by the set of the facet-defining halfspaces.A closed half-space can be written as a linear inequality
Linear inequality
In mathematics a linear inequality is an inequality which involves a linear function.-Definitions:When two expressions are connected by 'greater than' or 'less than' sign, we get an inequation....
:

where n is the dimension of the space containing the polytope under consideration. Hence, a closed convex polytope may be regarded as the set of solutions to the system of linear inequalities:
where m is the number of half-spaces defining the polytope. This can be concisely written as the matrix
Matrix (mathematics)
In mathematics, a matrix is a rectangular array of numbers, symbols, or expressions. The individual items in a matrix are called its elements or entries. An example of a matrix with six elements isMatrices of the same size can be added or subtracted element by element...
inequality:

where A is an m×n matrix, x is an n×1 column vector of variables, and b is an m×1 column vector of constants.
An open convex polytope is defined in the same way, with strict inequalities used in the formulas instead of the non-strict ones.
The coefficients of each row of A and b correspond with the coefficients of the linear inequality defining the respective half-space. Hence, each row in the matrix corresponds with a supporting hyperplane of the polytope, a hyperplane bounding a half-space that contains the polytope. If a supporting hyperplane also intersects the polytope, it is called a bounding hyperplane (since it is a supporting hyperplane, it can only intersect the polytope at the polytope's boundary).
The foregoing definition assumes that the polytope is full-dimensional. If it is not, then the solution of Ax ≤ b lies in a proper affine subspace of Rn and discussion of the polytope may be constrained to this subspace.
In general the intersection of arbitrary half-spaces need not be bounded. However if one wishes to have a definition equivalent to that as a convex hull, then bounding must be explicitly required.
Finite basis theorem
The finite basis theorem is an extension of the notion of V-description to include infinite polytopes. The theorem states that a convex polyhedron is the convex sum of its vertices plus the conical sum of the direction vectors of its infinite edges.Properties
Every (bounded) convex polytope is the image of a simplexSimplex
In geometry, a simplex is a generalization of the notion of a triangle or tetrahedron to arbitrary dimension. Specifically, an n-simplex is an n-dimensional polytope which is the convex hull of its n + 1 vertices. For example, a 2-simplex is a triangle, a 3-simplex is a tetrahedron,...
, as every point is a convex combination
Convex combination
In convex geometry, a convex combination is a linear combination of points where all coefficients are non-negative and sum up to 1....
of the (finitely many) vertices. However, polytopes are not in general isomorphic to simplices. This is in contrast to the case of vector spaces and linear combination
Linear combination
In mathematics, a linear combination is an expression constructed from a set of terms by multiplying each term by a constant and adding the results...
s, every finite dimensional vector space being not only an image of, but in fact isomorphic to, Euclidean space of some dimension (or analog over other fields).
The face lattice
A faceFace (geometry)
In geometry, a face of a polyhedron is any of the polygons that make up its boundaries. For example, any of the squares that bound a cube is a face of the cube...
of a convex polytope is any intersection of the polytope with a halfspace such that none of the interior points of the polytope lie on the boundary of the halfspace. If a polytope is d-dimensional, its facets
Facet (mathematics)
A facet of a simplicial complex is a maximal simplex.In the general theory of polyhedra and polytopes, two conflicting meanings are currently jostling for acceptability:...
are its (d − 1)-dimensional faces, its vertices
Vertex (geometry)
In geometry, a vertex is a special kind of point that describes the corners or intersections of geometric shapes.-Of an angle:...
are its 0-dimensional faces, its edges
Edge (geometry)
In geometry, an edge is a one-dimensional line segment joining two adjacent zero-dimensional vertices in a polygon. Thus applied, an edge is a connector for a one-dimensional line segment and two zero-dimensional objects....
are its 1-dimensional faces, and its ridges
Ridge (geometry)
In geometry, a ridge is an -dimensional element of an n-dimensional polytope. It is also sometimes called a subfacet for having one lower dimension than a facet.By dimension, this corresponds to:*a vertex of a polygon;...
are its (d − 2)-dimensional faces.
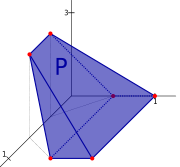
Given a convex polytope P defined by the matrix inequality
 , if each row in A corresponds with a bounding hyperplane and is linearly independent of the other rows, then each facet of P corresponds with exactly one row of A, and vice versa. Each point on a given facet will satisfy the linear equality of the corresponding row in the matrix. (It may or may not also satisfy equality in other rows). Similarly, each point on a ridge will satisfy equality in two of the rows of A.
, if each row in A corresponds with a bounding hyperplane and is linearly independent of the other rows, then each facet of P corresponds with exactly one row of A, and vice versa. Each point on a given facet will satisfy the linear equality of the corresponding row in the matrix. (It may or may not also satisfy equality in other rows). Similarly, each point on a ridge will satisfy equality in two of the rows of A.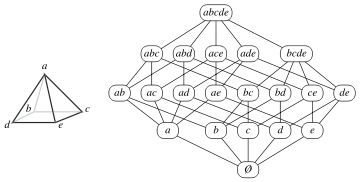
The faces of a convex polytope thus form an Eulerian
Eulerian poset
In combinatorial mathematics, an Eulerian poset is a graded poset in which every nontrivial interval has the same number of elements of even rank as of odd rank. An Eulerian poset which is a lattice is an Eulerian lattice. These objects are named after Leonhard Euler...
lattice
Lattice (order)
In mathematics, a lattice is a partially ordered set in which any two elements have a unique supremum and an infimum . Lattices can also be characterized as algebraic structures satisfying certain axiomatic identities...
called its face lattice, where the partial ordering is by set containment of faces. The definition of a face given above allows both the polytope itself and the empty set to be considered as faces, ensuring that every pair of faces has a join and a meet in the face lattice. The whole polytope is the unique maximum element of the lattice, and the empty set, considered to be a (−1)-dimensional face (a null polytope) of every polytope, is the unique minimum element of the lattice.
Two polytopes are called combinatorially isomorphic if their face lattices are isomorphic
Isomorphism
In abstract algebra, an isomorphism is a mapping between objects that shows a relationship between two properties or operations. If there exists an isomorphism between two structures, the two structures are said to be isomorphic. In a certain sense, isomorphic structures are...
.
The polytope graph (polytopal graph, graph of the polytope) is the set of vertices and edges of the polytope only - higher dimensional faces are ignored. For instance, a polyhedral graph
Polyhedral graph
In polyhedral combinatorics, a branch of mathematics, Steinitz's theorem is a characterization of the undirected graphs formed by the edges and vertices of three-dimensional convex polyhedra: they are exactly the 3-vertex-connected planar graphs...
is the polytope graph of a three-dimensional polytope. By a result of Whitney
Hassler Whitney
Hassler Whitney was an American mathematician. He was one of the founders of singularity theory, and did foundational work in manifolds, embeddings, immersions, and characteristic classes.-Work:...
the face lattice of a three-dimensional polytope is determined by its graph. The same is true if the polytope is simple (Blind & Mani-Levitska (1987), see Kalai (1988) for a simple proof). The latter fact is instrumental in the proof that from the point of view of computational complexity
Computational Complexity
Computational Complexity may refer to:*Computational complexity theory*Computational Complexity...
, the problem of deciding whether two convex polytopes are combinatorially isomorphic is equivalent to the graph isomorphism problem
Graph isomorphism problem
The graph isomorphism problem is the computational problem of determining whether two finite graphs are isomorphic.Besides its practical importance, the graph isomorphism problem is a curiosity in computational complexity theory as it is one of a very small number of problems belonging to NP...
, even when restricted to the class of simple or simplicial polytope
Simplicial polytope
In geometry, a simplicial polytope is a d-polytope whose facets are all simplices.For example, a simplicial polyhedron contains only triangular faces and corresponds via Steinitz's theorem to a maximal planar graph....
s.
Topological properties
A convex polytope, like any closed convex subset of Rn, is homeomorphicHomeomorphism
In the mathematical field of topology, a homeomorphism or topological isomorphism or bicontinuous function is a continuous function between topological spaces that has a continuous inverse function. Homeomorphisms are the isomorphisms in the category of topological spaces—that is, they are...
to a closed ball
Ball (mathematics)
In mathematics, a ball is the space inside a sphere. It may be a closed ball or an open ball ....
. Let m denote the dimension of the polytope. If the polytope is full-dimensional, then m = n. The convex polytope therefore is an m-dimensional manifold with boundary, its Euler characteristic
Euler characteristic
In mathematics, and more specifically in algebraic topology and polyhedral combinatorics, the Euler characteristic is a topological invariant, a number that describes a topological space's shape or structure regardless of the way it is bent...
is 1, and its fundamental group
Fundamental group
In mathematics, more specifically algebraic topology, the fundamental group is a group associated to any given pointed topological space that provides a way of determining when two paths, starting and ending at a fixed base point, can be continuously deformed into each other...
is trivial. The boundary of the convex polytope is homeomorphic to an (m − 1)-sphere. The boundary's Euler characteristic is 0 for even m and 2 for odd m. The boundary may also be regarded as a tessellation
Tessellation
A tessellation or tiling of the plane is a pattern of plane figures that fills the plane with no overlaps and no gaps. One may also speak of tessellations of parts of the plane or of other surfaces. Generalizations to higher dimensions are also possible. Tessellations frequently appeared in the art...
of (m − 1)-dimensional spherical space — i.e. as a spherical tiling.
Simplicial decomposition
A convex polytope can be decomposed into a simplicial complexSimplicial complex
In mathematics, a simplicial complex is a topological space of a certain kind, constructed by "gluing together" points, line segments, triangles, and their n-dimensional counterparts...
, or union of simplices
Simplex
In geometry, a simplex is a generalization of the notion of a triangle or tetrahedron to arbitrary dimension. Specifically, an n-simplex is an n-dimensional polytope which is the convex hull of its n + 1 vertices. For example, a 2-simplex is a triangle, a 3-simplex is a tetrahedron,...
, satisfying certain properties.
Given a convex r-dimensional polytope P, a subset of its vertices containing (r+1) linearly independent points defines an r-simplex
Simplex
In geometry, a simplex is a generalization of the notion of a triangle or tetrahedron to arbitrary dimension. Specifically, an n-simplex is an n-dimensional polytope which is the convex hull of its n + 1 vertices. For example, a 2-simplex is a triangle, a 3-simplex is a tetrahedron,...
. It is possible to form a collection of subsets such that the union of the corresponding simplices is equal to P, and the intersection of any two simplices is either empty or a lower-dimensional simplex.
Construction of representations
Different representations of a convex polytope have different utility, therefore the construction of one representation given another one is an important problem. The problem of the construction of a V-representation is known as the vertex enumeration problemVertex enumeration problem
In mathematics, the vertex enumeration problem for a polytope, a polyhedral cell complex, a hyperplane arrangement, or some other object of discrete geometry, is the problem of determination of the object's vertices given some formal representation of the object...
and the problem of the construction of a H-representation is known as the facet enumeration problem. While the vertex set of a bounded convex polytope uniquely defines it, in various applications it is important to know more about the combinatorial structure of the polytope, i.e., about its face lattice. Various convex hull algorithms
Convex hull algorithms
Algorithms that construct convex hulls of various objects have a broad range of applications in mathematics and computer science, see "Convex hull applications"....
deal both with the facet enumeration and face lattice construction.
In the planar case, i.e., for a convex polygon
Convex polygon
In geometry, a polygon can be either convex or concave .- Convex polygons :A convex polygon is a simple polygon whose interior is a convex set...
, both facet and vertex enumeration problems amount to the ordering vertices (resp. edges) around the convex hull. It is a trivial task when the convex polygon is specified in a traditional for polygon
Polygon
In geometry a polygon is a flat shape consisting of straight lines that are joined to form a closed chain orcircuit.A polygon is traditionally a plane figure that is bounded by a closed path, composed of a finite sequence of straight line segments...
s way, i.e., by the ordered sequence of its vertices
 . When the input list of vertices (or edges) is unordered, the time complexity
. When the input list of vertices (or edges) is unordered, the time complexityTime complexity
In computer science, the time complexity of an algorithm quantifies the amount of time taken by an algorithm to run as a function of the size of the input to the problem. The time complexity of an algorithm is commonly expressed using big O notation, which suppresses multiplicative constants and...
of the problems becomes O(m log m).
External links
- Komei Fukuda, Polyhedral computation FAQ.