

Quadrotor
Encyclopedia
A quadrotor, also called a quadrotor helicopter or quadrocopter, is an aircraft
that is lifted and propelled by four rotors
. Quadrotors are classified as rotorcraft
, as opposed to fixed-wing aircraft
, because their lift
is derived from four rotors. Unlike most helicopter
s, quadrotors use fixed-pitch blades, whose rotor pitch does not vary as the blades rotate; control of vehicle motion is achieved by varying the relative speed of each rotor to change the thrust and torque produced by each.
There are two generations of quadrotor designs. The first generation quadrotors were designed to carry one or more passengers. These vehicles were among the first successful heavier-than-air vertical take off and landing
(VTOL) vehicles. However, early prototypes suffered from poor performance, and latter prototypes required too much pilot work load, due to poor stability augmentation.
The more recent generation of quadrotors are commonly designed to be unmanned aerial vehicles (UAVs). These vehicles use an electronic control system
and electronic sensor
s to stabilize the aircraft. With their small size and agile maneuverability, these quadrotors can be flown indoors as well as outdoors.
The advantages of the current generation of quadrotors, versus comparably-scaled helicopters, are as follows. First, quadrotors do not require mechanical linkages to vary the rotor blade pitch angle as they spin. This simplifies the design and maintenance of the vehicle. Second, the use of four rotors allows each individual rotor to have a smaller diameter than the equivalent helicopter rotor, allowing them to possess less kinetic energy during flight. This reduces the damage caused should the rotors hit anything. For small-scale UAVs, this makes the vehicles safer for close interaction. Some small-scale quadrotors have frames that enclose the rotors, permitting flights through more challenging environments, with lower risk of damaging the vehicle or its surroundings.
Due to their ease of both construction and control, quadrotor aircraft are frequently used as amateur model aircraft projects.
 Each rotor produces both a thrust
Each rotor produces both a thrust
and torque
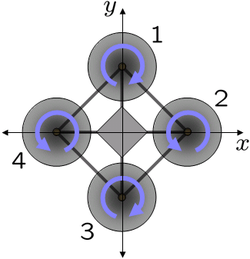
about its center of rotation, as well as a drag force opposite to the vehicle's direction of flight. If all rotors are spinning at the same angular velocity
, with rotors one and three rotating clockwise and rotors two and four counterclockwise, the net aerodynamic torque, and hence the angular acceleration about the yaw axis
is exactly zero, which implies that the yaw stabilizing rotor of conventional helicopters is not needed. Yaw is induced by mismatching the balance in aerodynamic torques (i.e., by offsetting the cumulative thrust commands between the counter-rotating blade pairs).
Angular accelerations about the pitch and roll axes can be caused separately without impacting the yaw axis. Each pair of blades rotating in the same direction controls one axis, either roll or pitch, and increasing thrust for one rotor while decreasing thrust for the other will maintain the torque balance needed for yaw stability and induce a net torque about the roll or pitch axes. This way, fixed rotor blades can be made to maneuver the quad rotor vehicle in all dimensions. Translational acceleration is achieved by maintaining a non-zero pitch or roll angle.
, designed to be controllable with Apple iOS (iPhone
, iPad, or iPod Touch
) products and phones with Android.
Aircraft
An aircraft is a vehicle that is able to fly by gaining support from the air, or, in general, the atmosphere of a planet. An aircraft counters the force of gravity by using either static lift or by using the dynamic lift of an airfoil, or in a few cases the downward thrust from jet engines.Although...
that is lifted and propelled by four rotors
Helicopter rotor
A helicopter main rotor or rotor system is a type of fan that is used to generate both the aerodynamic lift force that supports the weight of the helicopter, and thrust which counteracts aerodynamic drag in forward flight...
. Quadrotors are classified as rotorcraft
Rotorcraft
A rotorcraft or rotary wing aircraft is a heavier-than-air flying machine that uses lift generated by wings, called rotor blades, that revolve around a mast. Several rotor blades mounted to a single mast are referred to as a rotor. The International Civil Aviation Organization defines a rotorcraft...
, as opposed to fixed-wing aircraft
Fixed-wing aircraft
A fixed-wing aircraft is an aircraft capable of flight using wings that generate lift due to the vehicle's forward airspeed. Fixed-wing aircraft are distinct from rotary-wing aircraft in which wings rotate about a fixed mast and ornithopters in which lift is generated by flapping wings.A powered...
, because their lift
Lift (force)
A fluid flowing past the surface of a body exerts a surface force on it. Lift is the component of this force that is perpendicular to the oncoming flow direction. It contrasts with the drag force, which is the component of the surface force parallel to the flow direction...
is derived from four rotors. Unlike most helicopter
Helicopter
A helicopter is a type of rotorcraft in which lift and thrust are supplied by one or more engine-driven rotors. This allows the helicopter to take off and land vertically, to hover, and to fly forwards, backwards, and laterally...
s, quadrotors use fixed-pitch blades, whose rotor pitch does not vary as the blades rotate; control of vehicle motion is achieved by varying the relative speed of each rotor to change the thrust and torque produced by each.
There are two generations of quadrotor designs. The first generation quadrotors were designed to carry one or more passengers. These vehicles were among the first successful heavier-than-air vertical take off and landing
VTOL
A vertical take-off and landing aircraft is one that can hover, take off and land vertically. This classification includes fixed-wing aircraft as well as helicopters and other aircraft with powered rotors, such as cyclogyros/cyclocopters and tiltrotors...
(VTOL) vehicles. However, early prototypes suffered from poor performance, and latter prototypes required too much pilot work load, due to poor stability augmentation.
The more recent generation of quadrotors are commonly designed to be unmanned aerial vehicles (UAVs). These vehicles use an electronic control system
Control system
A control system is a device, or set of devices to manage, command, direct or regulate the behavior of other devices or system.There are two common classes of control systems, with many variations and combinations: logic or sequential controls, and feedback or linear controls...
and electronic sensor
Sensor
A sensor is a device that measures a physical quantity and converts it into a signal which can be read by an observer or by an instrument. For example, a mercury-in-glass thermometer converts the measured temperature into expansion and contraction of a liquid which can be read on a calibrated...
s to stabilize the aircraft. With their small size and agile maneuverability, these quadrotors can be flown indoors as well as outdoors.
The advantages of the current generation of quadrotors, versus comparably-scaled helicopters, are as follows. First, quadrotors do not require mechanical linkages to vary the rotor blade pitch angle as they spin. This simplifies the design and maintenance of the vehicle. Second, the use of four rotors allows each individual rotor to have a smaller diameter than the equivalent helicopter rotor, allowing them to possess less kinetic energy during flight. This reduces the damage caused should the rotors hit anything. For small-scale UAVs, this makes the vehicles safer for close interaction. Some small-scale quadrotors have frames that enclose the rotors, permitting flights through more challenging environments, with lower risk of damaging the vehicle or its surroundings.
Due to their ease of both construction and control, quadrotor aircraft are frequently used as amateur model aircraft projects.
Flight Control
Thrust
Thrust is a reaction force described quantitatively by Newton's second and third laws. When a system expels or accelerates mass in one direction the accelerated mass will cause a force of equal magnitude but opposite direction on that system....
and torque
Torque
Torque, moment or moment of force , is the tendency of a force to rotate an object about an axis, fulcrum, or pivot. Just as a force is a push or a pull, a torque can be thought of as a twist....
about its center of rotation, as well as a drag force opposite to the vehicle's direction of flight. If all rotors are spinning at the same angular velocity
Angular velocity
In physics, the angular velocity is a vector quantity which specifies the angular speed of an object and the axis about which the object is rotating. The SI unit of angular velocity is radians per second, although it may be measured in other units such as degrees per second, revolutions per...
, with rotors one and three rotating clockwise and rotors two and four counterclockwise, the net aerodynamic torque, and hence the angular acceleration about the yaw axis
Aircraft principal axes
An aircraft in flight is free to rotate in three dimensions: pitch, nose up or down about an axis running from wing to wing), yaw, nose left or right about an axis running up and down; and roll, rotation about an axis running from nose to tail. The axes are alternatively designated as lateral,...
is exactly zero, which implies that the yaw stabilizing rotor of conventional helicopters is not needed. Yaw is induced by mismatching the balance in aerodynamic torques (i.e., by offsetting the cumulative thrust commands between the counter-rotating blade pairs).
Angular accelerations about the pitch and roll axes can be caused separately without impacting the yaw axis. Each pair of blades rotating in the same direction controls one axis, either roll or pitch, and increasing thrust for one rotor while decreasing thrust for the other will maintain the torque balance needed for yaw stability and induce a net torque about the roll or pitch axes. This way, fixed rotor blades can be made to maneuver the quad rotor vehicle in all dimensions. Translational acceleration is achieved by maintaining a non-zero pitch or roll angle.
History
- Oehmichen No.2, 1920
Etienne OehmichenEtienne OehmichenÉtienne Oehmichen was a French engineer and helicopter designer....
experimented with rotorcraft designs in the 1920s. Among the six designs he tried, his helicopter No.2 had four rotors and eight propellers, all driven by a single engine. The Oehmichen No.2 used a steel-tube frame, with two-bladed rotors at the ends of the four arms. The angle of these blades could be varied by warping. Five of the propellers, spinning in the horizontal plane, stabilized the machine laterally. Another propeller was mounted at the nose for steering. The remaining pair of propellers were for forward propulsion. The aircraft exhibited a considerable degree of stability and controllability for its time, and made more than a thousand test flights during the middle 1920s. By 1923 it was able to remain airborne for several minutes at a time, and on April 14, 1924 it established the first-ever FAI distance record for helicopters of 360 m (393.7 yd). Later, it completed the first 1 kilometre (0.621372736649807 mi) closed-circuit flight by a rotorcraft.
- de Bothezat quadratorDe Bothezat helicopter|-See also:-References:NotesCitationsBibliography* Lambermont, Paul Marcel. Helicopters and autogyros of the world. London: Cassell, 1958....
, 1922
Dr. George de BothezatGeorge de BothezatGeorge de Bothezat was a Russian American engineer, businessman and pioneer of helicopter flight.-Biography:George Bothezat was born in a family of Bessarabian landlords in 1882. After graduating school in Iași and attending the University of Iaşi he enrolled at the Mechanical Department of...
and Ivan Jerome developed this aircraft, with six bladed rotors at the end of an X-shaped structure. Two small propellers with variable pitch were used for thrust and yaw control. The vehicle used collective pitch control. It made its first flight in October 1922. About 100 flights were made by the end of 1923. The highest it ever reached was about 5 metre. Although demonstrating feasibility, it was, underpowered, unresponsive, mechanically complex and susceptible to reliability problems. Pilot workload was too high during hover to attempt lateral motion.
- Convertawings Model A Quadrotor, 1956
- This unique helicopter was intended to be the prototype for a line of much larger civil and military quadrotor helicopters. The design featured two engines driving four rotors with wings added for additional lift in forward flight. No tailrotor was needed and control was obtained by varying the thrust between rotors. Flown successfully many times in the mid 1950s, this helicopter proved the quadrotor design and it was also the first four-rotor helicopter to demonstrate successful forward flight. Due to a lack of orders for commercial or military versions however, the project was terminated.
- Convertawings proposed a Model E that would have a maximum weight of 42000 lb (19,050.9 kg) with a payload of 10900 lb (4,944.2 kg).
- Curtiss-Wright VZ-7Curtiss-Wright VZ-7-See also:...
, 1958
- The Curtiss-Wright VZ-7 was a VTOLVTOLA vertical take-off and landing aircraft is one that can hover, take off and land vertically. This classification includes fixed-wing aircraft as well as helicopters and other aircraft with powered rotors, such as cyclogyros/cyclocopters and tiltrotors...
aircraft designed by the Curtiss-WrightCurtiss-WrightThe Curtiss-Wright Corporation was the largest aircraft manufacturer in the United States at the end of World War II, but has evolved to largely become a component manufacturer, specializing in actuators, aircraft controls, valves, and metalworking....
company for the US Army. The VZ-7 was controlled by changing the thrust of each of the four propellers.
Bell Boeing Quad TiltRotor
The Bell Boeing Quad TiltRotor concept takes the fixed quadrotor concept further by combining it with the tilt rotor concept for a proposed C-130 sized military transport.Other
Small quadrotor aircraft are also produced commercially and for military roles such as observation.RC Aircraft
The Parrot AR.Drone is a small radio controlled quadricopter with cameras attached to it built by Parrot SAParrot (company)
Parrot SA is a wireless products manufacturer company based in Paris, France. It was founded in 1994 by Christine/M De Tourvel, Jean-Pierre Talvard and Henri Seydoux and is currently a member of the CAC Small 90.- The company :...
, designed to be controllable with Apple iOS (iPhone
IPhone
The iPhone is a line of Internet and multimedia-enabled smartphones marketed by Apple Inc. The first iPhone was unveiled by Steve Jobs, then CEO of Apple, on January 9, 2007, and released on June 29, 2007...
, iPad, or iPod Touch
IPod Touch
The iPod Touch is a portable media player, personal digital assistant, handheld game console, and Wi-Fi mobile device designed and marketed by Apple Inc. The iPod Touch adds the multi-touch graphical user interface to the iPod line...
) products and phones with Android.