
Seifert fiber space
Encyclopedia
A Seifert fiber space is a 3-manifold
together with a "nice" decomposition as a disjoint union of circles. In other words it is a -bundle (circle bundle) over a 2-dimensional orbifold
-bundle (circle bundle) over a 2-dimensional orbifold
. Most "small" 3-manifolds are Seifert fiber spaces, and they account for all compact oriented manifolds in 6 of the 8 Thurston geometries of the geometrization conjecture
.
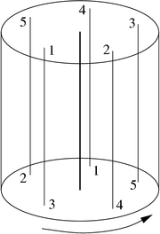
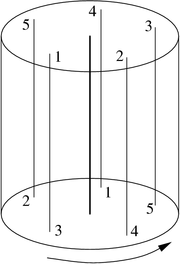 A Seifert manifold is a closed 3-manifold together with a decomposition into a disjoint union of circles (called fibers) such that each fiber has a tubular neighborhood that forms a standard fibered torus.
A Seifert manifold is a closed 3-manifold together with a decomposition into a disjoint union of circles (called fibers) such that each fiber has a tubular neighborhood that forms a standard fibered torus.
A standard fibered torus corresponding to a pair of coprime integers (a,b) with a>0 is the surface bundle
of the automorphism of a disk given by rotation by an angle of 2πb/a (with the natural fibering by circles). If a = 1 the middle fiber is called ordinary, while if a>1 the middle fiber is called exceptional. A compact Seifert fiber space has only a finite number of exceptional fibers.
The set of fibers forms a 2-dimensional orbifold
, denoted by B and called the base -also called the orbit surface- of the fibration.
It has an underlying 2-dimensional surface B0, but may have some special orbifold points corresponding to the exceptional fibers.
The definition of Seifert fibration can be generalized in several ways.
The Seifert manifold is often allowed to have a boundary (also fibered by circles, so it is a union of tori). When studying non-orientable manifolds, it is sometimes useful to allow fibers to have neighborhoods that look like the surface bundle of a reflection (rather than a rotation) of a disk, so that some fibers have neighborhoods looking like fibered Klein bottles, in which case there may be one-parameter families of exceptional curves. In both of these cases, the base B of the fibration usually has a non-empty boundary.

where:
 is one of the 6 symbols:
is one of the 6 symbols:  , (or Oo, No, NnI, On, NnII, NnIII in Seifert's original notation) meaning:
, (or Oo, No, NnI, On, NnII, NnIII in Seifert's original notation) meaning:
The Seifert fibration of the symbol
can be constructed from that of symbol
by using surgery to add fibers of types b and bi/ai.
If we drop the normalization conditions then the symbol can be changed as follows:Adding 1 to b and subtracting ai from bi has no effect. (In other words we can add integers to each of the rational numbers (b, b1/a1, ..., br/ar provided that their sum remains constant.)
If the manifold is not orientable, changing the sign of bi has no effect.
Adding a fiber of type (1,0) has no effect.
Every symbol is equivalent under these operations to s unique normalized symbol. When working with unnormalized symbols, the integer b can be set to zero by adding a fiber of type (1, b).
Two closed Seifert oriented or non-orientable fibrations are isomorphic as oriented or non-orientable fibrations if and only if they have the same normalized symbol. However, it is sometimes possible for two Seifert manifolds to be homeomorphic even if they have different normalized symbols, because a few manifolds (such as lens spaces) can have more than one sort of Seifert fibration. Also an oriented fibration under a change of orientation becomes the Seifert fibration whose symbol has the sign of all the bs changed, which after normalization
gives it the symbol
and it is homeomorphic to this as an unoriented manifold.
The sum b + Σbi/ai is an invariant of oriented fibrations,
which is zero if and only if the fibration becomes trivial after taking a finite cover of B.
The orbifold Euler characteristic
χ(B) of the orbifold B is given by
where χ(B0) is the usual Euler characteristic of the underlying topological surface B0 of the orbifold B. The behavior of M depends largely on the sign of the orbifold Euler characteristic of B.

where π1(B) is the orbifold fundamental group of B (which is not the same as the fundamental group of the underlying topological manifold). The image of group π1(S1) is cyclic, normal, and generated by the element h represented by any regular fiber, but the map from π1(S1) to π1(M) is not always injective.
The fundamental group of M has the following presentation
by generators and relations:
B orientable:
where ε is 1 for type o1, and is −1 for type o2.
B non-orientable:
where εi is 1 or −1 depending on whether the corresponding generator vi preserves or reverses orientation of the fiber.
(So εi are all 1 for type n1, all −1
for type n2, just the first one is one
for type n3,
and
just the first two are one for type n4.)
if the fundamental group is finite, and an S2×R Thurston geometry if the fundamental group is infinite. Equivalently, the geometry is S2×R if the manifold is non-orientable or if b + Σbi/ai= 0, and spherical geometry otherwise.
{b; (o1, 0);} (b integral)
is S2×S1 for b=0, otherwise a lens space
L(b,1). ({1; (o1, 0);} =L(1,1) is the 3-sphere.)
{b; (o1, 0);(a1, b1)} (b integral)
is the Lens space
L(ba1+b1,a1).
{b; (o1, 0);(a1, b1), (a2, b2)} (b integral)
is S2×S1 if ba1a2+a1b2+a2b1 = 0, otherwise the lens space
L(ba1a2+a1b2+a2b1, ma2+nb2) where ma1 − n(ba1 +b1) = 1.
{b; (o1, 0);(2, 1), (2, 1), (a3, b3)} (b integral)
This is the Prism manifold with fundamental group of order 4a3|(b+1)a3+b3|
and first homology group of order 4|(b+1)a3+b3|.
{b; (o1, 0);(2, 1), (3, b2), (3, b3)} (b integral)
The fundamental group is a central extension of the tetrahedral group of order 12 by a cyclic group.
{b; (o1, 0);(2, 1), (3, b2), (4, b3)} (b integral)
The fundamental group is the product of a cyclic group of order |12b+6+4b2 + 3b3| and a double cover of order 48 of the octahedral group
of order 24.
{b; (o1, 0);(2, 1), (3, b2), (5, b3)} (b integral)
The fundamental group is the product of a cyclic group of order m=|30b+15+10b2 +6b3| and the order 120 perfect double cover of the icosahedral group. The manifolds are
quotients of the Poincaré sphere
by cyclic groups of order m. In particular {−1; (o1, 0);(2, 1), (3, 1), (5, 1)} is the Poincaré sphere.
{b; (n1, 1);} (b is 0 or 1.)
These are the non-orientable 3-manifolds with S2×R geometry.
If b is even this is homeomorphic to
the projective plane times the circle, otherwise it is homeomorphic to a surface bundle associated to an orientation reversing automorphism of the 2-sphere.
{b; (n1, 1);(a1, b1)} (b is 0 or 1.)
These are the non-orientable 3-manifolds with S2×R geometry.
If ba1+b1 is even this is homeomorphic to
the projective plane times the circle, otherwise it is homeomorphic to a surface bundle associated to an orientation reversing automorphism of the 2-sphere.
{b; (n2, 1);} (b integral.)
This is the Prism manifold with fundamental group of order 4|b| and first homology group of order 4, except for b=0 when it is a sum of two copies of real projective space, and |b|=1 when it is the lens space
with fundamental group of order 4.
{b; (n2, 1);(a1, b1)} (b integral.)
This is the (unique) Prism manifold with fundamental group of order
4a1|ba1 + b1| and first homology group of order 4a1.
if they are non-orientable or if b + Σbi/ai= 0, and nil geometry otherwise. Equivalently, the manifold has Euclidean geometry if and only if its fundamental group has an abelian group of finite index. There are 10 Euclidean manifolds, but four of them have two different Seifert fibrations. All surface bundles associated to automorphisms of the 2-torus of trace 2, 1, 0, −1, or −2 are Seifert fibrations with zero orbifold Euler characteristic (the ones for other (Anosov) automorphisms are not Seifert fiber spaces, but have sol geometry). The manifolds with nil geometry all have a unique Seifert fibration, and are characterized by their fundamental groups. The total spaces are all acyclic.
{b; (o1, 0); (3, b1), (3, b2), (3, b3)} (b integral, bi is 1 or 2)
For b + Σbi/ai= 0 this is an oriented Euclidean 2-torus bundle over the circle, and is the surface bundle associated to an order 3 (trace −1) rotation of the 2-torus.
{b; (o1, 0); (2,1), (4, b2), (4, b3)} (b integral, bi is 1 or 3)
For b + Σbi/ai= 0 this is an oriented Euclidean 2-torus bundle over the circle, and is the surface bundle associated to an order 4 (trace 0) rotation of the 2-torus.
{b; (o1, 0); (2, 1), (3, b2), (6, b3)} (b integral, b2 is 1 or 2, b3 is 1 or 5)
For b + Σbi/ai= 0 this is an oriented Euclidean 2-torus bundle over the circle, and is the surface bundle associated to an order 6 (trace 1) rotation of the 2-torus.
{b; (o1, 0); (2, 1), (2, 1), (2, 1), (2, 1)} (b integral)
These are oriented 2-torus bundles for trace −2 automorphisms of the 2-torus. For b=−2 this is an oriented Euclidean 2-torus bundle over the circle (the surface bundle associated to an order 2 rotation of the 2-torus) and is homeomorphic to {0; (n2, 2);}.
{b; (o1, 1); } (b integral)
This is an oriented 2-torus bundle over the circle, given as the surface bundle associated to a trace 2 automorphism of the 2-torus. For b=0 this is Euclidean, and is the 3-torus (the surface bundle associated to the identity map of the 2-torus).
{b; (o2, 1); } (b is 0 or 1)
Two non-orientable Euclidean Klein bottle
bundles over the circle. The first homology is Z+Z+Z/2Z if b=0, and Z+Z if b=1.
The first is the Klein bottle times S1 and other is the surface bundle associated to a Dehn twist
of the Klein bottle
.
They are homeomorphic to the torus bundles {b; (n1, 2);}.
{0; (n1, 1); (2, 1), (2, 1)}
Homeomorphic to the non-orientable Euclidean Klein bottle bundle {1; (n3, 2);}, with first homology Z + Z/4Z.
{b; (n1, 2); } (b is 0 or 1)
These are the non-orientable Euclidean surface bundles associated with orientation reversing order 2 automorphisms of a 2-torus with no fixed points.
The first homology is Z+Z+Z/2Z if b=0, and Z+Z if b=1.
They are homeomorphic to the Klein bottle bundles {b; (o2, 1);}.
{b; (n2, 1); (2, 1), (2, 1)} (b integral)
For b=−1 this is oriented Euclidean.
{b; (n2, 2); } (b integral)
For b=0 this is an oriented Euclidean manifold, homeomorphic to the 2-torus bundle {−2; (o1, 0); (2, 1), (2, 1), (2, 1), (2, 1)} over the cicle associated to an order 2 rotation of the 2-torus.
{b; (n3, 2); } (b is 0 or 1)
The other two non-orientable Euclidean Klein bottle bundles. The one with b = 1 is homeomorphic to {0; (n1, 1); (2, 1), (2, 1)}. The first homology is Z+Z/2Z+Z/2Z if b=0, and Z+Z/4Z if b=1. These two Klein bottle bundle are surface bundles associated to the y-homeomorphism
and the product of this and the twist.
of type the universal cover of SL2(R), unless some finite cover splits as a product, in which case they have Thurston geometries of type H2×R.
This happens if the manifold is non-orientable or b + Σbi/ai= 0.
3-manifold
In mathematics, a 3-manifold is a 3-dimensional manifold. The topological, piecewise-linear, and smooth categories are all equivalent in three dimensions, so little distinction is made in whether we are dealing with say, topological 3-manifolds, or smooth 3-manifolds.Phenomena in three dimensions...
together with a "nice" decomposition as a disjoint union of circles. In other words it is a
-bundle (circle bundle) over a 2-dimensional orbifoldOrbifold
In the mathematical disciplines of topology, geometry, and geometric group theory, an orbifold is a generalization of a manifold...
. Most "small" 3-manifolds are Seifert fiber spaces, and they account for all compact oriented manifolds in 6 of the 8 Thurston geometries of the geometrization conjecture
Geometrization conjecture
Thurston's geometrization conjecture states that compact 3-manifolds can be decomposed canonically into submanifolds that have geometric structures. The geometrization conjecture is an analogue for 3-manifolds of the uniformization theorem for surfaces...
.
Definition
A standard fibered torus corresponding to a pair of coprime integers (a,b) with a>0 is the surface bundle
Surface bundle
In mathematics, a surface bundle is a bundle in which the fiber is a surface. When the base space is a circle the total space is three-dimensional and is often called a surface bundle over the circle....
of the automorphism of a disk given by rotation by an angle of 2πb/a (with the natural fibering by circles). If a = 1 the middle fiber is called ordinary, while if a>1 the middle fiber is called exceptional. A compact Seifert fiber space has only a finite number of exceptional fibers.
The set of fibers forms a 2-dimensional orbifold
Orbifold
In the mathematical disciplines of topology, geometry, and geometric group theory, an orbifold is a generalization of a manifold...
, denoted by B and called the base -also called the orbit surface- of the fibration.
It has an underlying 2-dimensional surface B0, but may have some special orbifold points corresponding to the exceptional fibers.
The definition of Seifert fibration can be generalized in several ways.
The Seifert manifold is often allowed to have a boundary (also fibered by circles, so it is a union of tori). When studying non-orientable manifolds, it is sometimes useful to allow fibers to have neighborhoods that look like the surface bundle of a reflection (rather than a rotation) of a disk, so that some fibers have neighborhoods looking like fibered Klein bottles, in which case there may be one-parameter families of exceptional curves. In both of these cases, the base B of the fibration usually has a non-empty boundary.
Classification
Seifert classified all closed Seifert fibrations in terms of the following invariants. Seifert manifolds are denoted by symbolswhere:
is one of the 6 symbols: , (or Oo, No, NnI, On, NnII, NnIII in Seifert's original notation) meaning:
-
- o1 if B is orientable and M is orientable.
- o2 if B is orientable and M is not orientable.
- n1 if B is not orientable and M is not orientable and all generators of π1(B) preserve orientation of the fiber.
- n2 if B is not orientable and M is orientable, so all generators of π1(B) reverse orientation of the fiber.
- n3 if B is not orientable and M is not orientable and g≥ 2 and exactly one generator of π1(B) preserves orientation of the fiber.
- n4 if B is not orientable and M is not orientable and g≥ 3 and exactly two generators of π1(B) preserve orientation of the fiber.
- g is the genus of the underlying 2-manifold of the orbit surface.
- b is an integer, normalized to be 0 or 1 if M is not orientable and normalized to be 0 if in addition some ai is 2.,...,(ar,br) are the pairs of numbers determining the type of each of the r exceptional orbits. They are normalized so that 0<bi<ai when M is orientable, and 0<bi≤ai/2 when M is not orientable.
The Seifert fibration of the symbol
can be constructed from that of symbol
by using surgery to add fibers of types b and bi/ai.
If we drop the normalization conditions then the symbol can be changed as follows:
- Changing the sign of both
Every symbol is equivalent under these operations to s unique normalized symbol. When working with unnormalized symbols, the integer b can be set to zero by adding a fiber of type (1, b).
Two closed Seifert oriented or non-orientable fibrations are isomorphic as oriented or non-orientable fibrations if and only if they have the same normalized symbol. However, it is sometimes possible for two Seifert manifolds to be homeomorphic even if they have different normalized symbols, because a few manifolds (such as lens spaces) can have more than one sort of Seifert fibration. Also an oriented fibration under a change of orientation becomes the Seifert fibration whose symbol has the sign of all the bs changed, which after normalization
gives it the symbol
and it is homeomorphic to this as an unoriented manifold.
The sum b + Σbi/ai is an invariant of oriented fibrations,
which is zero if and only if the fibration becomes trivial after taking a finite cover of B.
The orbifold Euler characteristic
Euler characteristic
In mathematics, and more specifically in algebraic topology and polyhedral combinatorics, the Euler characteristic is a topological invariant, a number that describes a topological space's shape or structure regardless of the way it is bent...
χ(B) of the orbifold B is given by
- χ(B) = χ(B0) − Σ(1−1/ai)
where χ(B0) is the usual Euler characteristic of the underlying topological surface B0 of the orbifold B. The behavior of M depends largely on the sign of the orbifold Euler characteristic of B.
Fundamental group
The fundamental group of M fits into the exact sequencewhere π1(B) is the orbifold fundamental group of B (which is not the same as the fundamental group of the underlying topological manifold). The image of group π1(S1) is cyclic, normal, and generated by the element h represented by any regular fiber, but the map from π1(S1) to π1(M) is not always injective.
The fundamental group of M has the following presentation
Presentation of a group
In mathematics, one method of defining a group is by a presentation. One specifies a set S of generators so that every element of the group can be written as a product of powers of some of these generators, and a set R of relations among those generators...
by generators and relations:
B orientable:
where ε is 1 for type o1, and is −1 for type o2.
B non-orientable:
where εi is 1 or −1 depending on whether the corresponding generator vi preserves or reverses orientation of the fiber.
(So εi are all 1 for type n1, all −1
for type n2, just the first one is one
for type n3,
and
just the first two are one for type n4.)
Positive orbifold Euler characteristic
The normalized symbols of Seifert fibrations with positive orbifold Euler characteristic are given in the list below. The Seifert manifolds often have many different Seifert fibrations. They have a spherical Thurston geometryGeometrization conjecture
Thurston's geometrization conjecture states that compact 3-manifolds can be decomposed canonically into submanifolds that have geometric structures. The geometrization conjecture is an analogue for 3-manifolds of the uniformization theorem for surfaces...
if the fundamental group is finite, and an S2×R Thurston geometry if the fundamental group is infinite. Equivalently, the geometry is S2×R if the manifold is non-orientable or if b + Σbi/ai= 0, and spherical geometry otherwise.
{b; (o1, 0);} (b integral)
is S2×S1 for b=0, otherwise a lens space
Lens space
A lens space is an example of a topological space, considered in mathematics. The term often refers to a specific class of 3-manifolds, but in general can be defined for higher dimensions....
L(b,1). ({1; (o1, 0);} =L(1,1) is the 3-sphere.)
{b; (o1, 0);(a1, b1)} (b integral)
is the Lens space
Lens space
A lens space is an example of a topological space, considered in mathematics. The term often refers to a specific class of 3-manifolds, but in general can be defined for higher dimensions....
L(ba1+b1,a1).
{b; (o1, 0);(a1, b1), (a2, b2)} (b integral)
is S2×S1 if ba1a2+a1b2+a2b1 = 0, otherwise the lens space
Lens space
A lens space is an example of a topological space, considered in mathematics. The term often refers to a specific class of 3-manifolds, but in general can be defined for higher dimensions....
L(ba1a2+a1b2+a2b1, ma2+nb2) where ma1 − n(ba1 +b1) = 1.
{b; (o1, 0);(2, 1), (2, 1), (a3, b3)} (b integral)
This is the Prism manifold with fundamental group of order 4a3|(b+1)a3+b3|
and first homology group of order 4|(b+1)a3+b3|.
{b; (o1, 0);(2, 1), (3, b2), (3, b3)} (b integral)
The fundamental group is a central extension of the tetrahedral group of order 12 by a cyclic group.
{b; (o1, 0);(2, 1), (3, b2), (4, b3)} (b integral)
The fundamental group is the product of a cyclic group of order |12b+6+4b2 + 3b3| and a double cover of order 48 of the octahedral group
Octahedral symmetry
150px|thumb|right|The [[cube]] is the most common shape with octahedral symmetryA regular octahedron has 24 rotational symmetries, and a symmetry order of 48 including transformations that combine a reflection and a rotation...
of order 24.
{b; (o1, 0);(2, 1), (3, b2), (5, b3)} (b integral)
The fundamental group is the product of a cyclic group of order m=|30b+15+10b2 +6b3| and the order 120 perfect double cover of the icosahedral group. The manifolds are
quotients of the Poincaré sphere
Poincaré sphere
Poincaré sphere, often spelled Poincare sphere may refer to:* Poincaré sphere, in optics, is a graphical tool for visualizing different types of polarized light...
by cyclic groups of order m. In particular {−1; (o1, 0);(2, 1), (3, 1), (5, 1)} is the Poincaré sphere.
{b; (n1, 1);} (b is 0 or 1.)
These are the non-orientable 3-manifolds with S2×R geometry.
If b is even this is homeomorphic to
the projective plane times the circle, otherwise it is homeomorphic to a surface bundle associated to an orientation reversing automorphism of the 2-sphere.
{b; (n1, 1);(a1, b1)} (b is 0 or 1.)
These are the non-orientable 3-manifolds with S2×R geometry.
If ba1+b1 is even this is homeomorphic to
the projective plane times the circle, otherwise it is homeomorphic to a surface bundle associated to an orientation reversing automorphism of the 2-sphere.
{b; (n2, 1);} (b integral.)
This is the Prism manifold with fundamental group of order 4|b| and first homology group of order 4, except for b=0 when it is a sum of two copies of real projective space, and |b|=1 when it is the lens space
Lens space
A lens space is an example of a topological space, considered in mathematics. The term often refers to a specific class of 3-manifolds, but in general can be defined for higher dimensions....
with fundamental group of order 4.
{b; (n2, 1);(a1, b1)} (b integral.)
This is the (unique) Prism manifold with fundamental group of order
4a1|ba1 + b1| and first homology group of order 4a1.
Zero orbifold Euler characteristic
The normalized symbols of Seifert fibrations with zero orbifold Euler characteristic are given in the list below. The manifolds have Euclidean Thurston geometryGeometrization conjecture
Thurston's geometrization conjecture states that compact 3-manifolds can be decomposed canonically into submanifolds that have geometric structures. The geometrization conjecture is an analogue for 3-manifolds of the uniformization theorem for surfaces...
if they are non-orientable or if b + Σbi/ai= 0, and nil geometry otherwise. Equivalently, the manifold has Euclidean geometry if and only if its fundamental group has an abelian group of finite index. There are 10 Euclidean manifolds, but four of them have two different Seifert fibrations. All surface bundles associated to automorphisms of the 2-torus of trace 2, 1, 0, −1, or −2 are Seifert fibrations with zero orbifold Euler characteristic (the ones for other (Anosov) automorphisms are not Seifert fiber spaces, but have sol geometry). The manifolds with nil geometry all have a unique Seifert fibration, and are characterized by their fundamental groups. The total spaces are all acyclic.
{b; (o1, 0); (3, b1), (3, b2), (3, b3)} (b integral, bi is 1 or 2)
For b + Σbi/ai= 0 this is an oriented Euclidean 2-torus bundle over the circle, and is the surface bundle associated to an order 3 (trace −1) rotation of the 2-torus.
{b; (o1, 0); (2,1), (4, b2), (4, b3)} (b integral, bi is 1 or 3)
For b + Σbi/ai= 0 this is an oriented Euclidean 2-torus bundle over the circle, and is the surface bundle associated to an order 4 (trace 0) rotation of the 2-torus.
{b; (o1, 0); (2, 1), (3, b2), (6, b3)} (b integral, b2 is 1 or 2, b3 is 1 or 5)
For b + Σbi/ai= 0 this is an oriented Euclidean 2-torus bundle over the circle, and is the surface bundle associated to an order 6 (trace 1) rotation of the 2-torus.
{b; (o1, 0); (2, 1), (2, 1), (2, 1), (2, 1)} (b integral)
These are oriented 2-torus bundles for trace −2 automorphisms of the 2-torus. For b=−2 this is an oriented Euclidean 2-torus bundle over the circle (the surface bundle associated to an order 2 rotation of the 2-torus) and is homeomorphic to {0; (n2, 2);}.
{b; (o1, 1); } (b integral)
This is an oriented 2-torus bundle over the circle, given as the surface bundle associated to a trace 2 automorphism of the 2-torus. For b=0 this is Euclidean, and is the 3-torus (the surface bundle associated to the identity map of the 2-torus).
{b; (o2, 1); } (b is 0 or 1)
Two non-orientable Euclidean Klein bottle
Klein bottle
In mathematics, the Klein bottle is a non-orientable surface, informally, a surface in which notions of left and right cannot be consistently defined. Other related non-orientable objects include the Möbius strip and the real projective plane. Whereas a Möbius strip is a surface with boundary, a...
bundles over the circle. The first homology is Z+Z+Z/2Z if b=0, and Z+Z if b=1.
The first is the Klein bottle times S1 and other is the surface bundle associated to a Dehn twist
Dehn twist
In geometric topology, a branch of mathematics, a Dehn twist is a certain type of self-homeomorphism of a surface .-Definition:...
of the Klein bottle
Klein bottle
In mathematics, the Klein bottle is a non-orientable surface, informally, a surface in which notions of left and right cannot be consistently defined. Other related non-orientable objects include the Möbius strip and the real projective plane. Whereas a Möbius strip is a surface with boundary, a...
.
They are homeomorphic to the torus bundles {b; (n1, 2);}.
{0; (n1, 1); (2, 1), (2, 1)}
Homeomorphic to the non-orientable Euclidean Klein bottle bundle {1; (n3, 2);}, with first homology Z + Z/4Z.
{b; (n1, 2); } (b is 0 or 1)
These are the non-orientable Euclidean surface bundles associated with orientation reversing order 2 automorphisms of a 2-torus with no fixed points.
The first homology is Z+Z+Z/2Z if b=0, and Z+Z if b=1.
They are homeomorphic to the Klein bottle bundles {b; (o2, 1);}.
{b; (n2, 1); (2, 1), (2, 1)} (b integral)
For b=−1 this is oriented Euclidean.
{b; (n2, 2); } (b integral)
For b=0 this is an oriented Euclidean manifold, homeomorphic to the 2-torus bundle {−2; (o1, 0); (2, 1), (2, 1), (2, 1), (2, 1)} over the cicle associated to an order 2 rotation of the 2-torus.
{b; (n3, 2); } (b is 0 or 1)
The other two non-orientable Euclidean Klein bottle bundles. The one with b = 1 is homeomorphic to {0; (n1, 1); (2, 1), (2, 1)}. The first homology is Z+Z/2Z+Z/2Z if b=0, and Z+Z/4Z if b=1. These two Klein bottle bundle are surface bundles associated to the y-homeomorphism
Y-homeomorphism
In mathematics, the y-homeomorphism, or crosscap slide, is a special type of auto-homeomorphism in non-orientable surfaces.It can be constructed by sliding a Möbius band included on the surface...
and the product of this and the twist.
Negative orbifold Euler characteristic
This is the general case. All such Seifert fibrations are determined up to isomorphism by their fundamental group. The total spaces are aspherical (in other words all higher homotopy groups vanish). They have Thurston geometriesGeometrization conjecture
Thurston's geometrization conjecture states that compact 3-manifolds can be decomposed canonically into submanifolds that have geometric structures. The geometrization conjecture is an analogue for 3-manifolds of the uniformization theorem for surfaces...
of type the universal cover of SL2(R), unless some finite cover splits as a product, in which case they have Thurston geometries of type H2×R.
This happens if the manifold is non-orientable or b + Σbi/ai= 0.