
Type-2 fuzzy sets and systems
Encyclopedia
Type-2 fuzzy sets and systems generalize (type-1) fuzzy sets and systems
so that more uncertainty can be handled. From the very beginning of fuzzy sets, criticism was made about the fact that the membership function of a type-1 fuzzy set has no uncertainty associated with it, something that seems to contradict the word fuzzy, since that word has the connotation of lots of uncertainty. So, what does one do when there is uncertainty about the value of the membership function? The answer to this question was provided in 1975 by the inventor of fuzzy sets, Prof. Lotfi A. Zadeh [27], when he proposed more sophisticated kinds of fuzzy sets, the first of which he called a type-2 fuzzy set. A type-2 fuzzy set lets us incorporate uncertainty about the membership function into fuzzy set theory, and is a way to address the above criticism of type-1 fuzzy sets head-on. And, if there is no uncertainty, then a type-2 fuzzy set reduces to a type-1 fuzzy set, which is analogous to probability reducing to determinism when unpredictability vanishes.
In order to symbolically distinguish between a type-1 fuzzy set and a type-2 fuzzy set, a tilde symbol is put over the symbol for the fuzzy set; so, A denotes a type-1 fuzzy set, whereas à denotes the comparable type-2 fuzzy set. In the following discussions it is names may be used, they are the same fuzzy set). When the latter is done, the resulting type-2 fuzzy set is called a general type-2 fuzzy set (to distinguish it from the special interval type-2 fuzzy set).
Prof. Zadeh didn’t stop with type-2 fuzzy sets, because in that 1976 paper [27] he also generalized all of this to type-n fuzzy sets. The present article focuses only on type-2 fuzzy sets because they are the next step in the logical progression from type-1 to type-n fuzzy sets, where n = 1, 2, … . Although some researchers are beginning to explore higher than type-2 fuzzy sets, as of early 2009, this work is in its infancy.
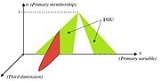
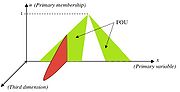 The membership function of a general type-2 fuzzy set, Ã, is three-dimensional (Fig. 1), where the third dimension is the value of the membership function at each point on its two-dimensional domain that is called its footprint of uncertainty (FOU).
The membership function of a general type-2 fuzzy set, Ã, is three-dimensional (Fig. 1), where the third dimension is the value of the membership function at each point on its two-dimensional domain that is called its footprint of uncertainty (FOU).
For an interval type-2 fuzzy set that third-dimension value is the same (e.g., 1) everywhere, which means that no new information is contained in the third dimension of an interval type-2 fuzzy set. So, for such a set, the third dimension is ignored, and only the FOU is used to describe it. It is for this reason that an interval type-2 fuzzy set is sometimes called a first-order uncertainty fuzzy set model, whereas a general type-2 fuzzy set (with its useful third-dimension) is sometimes referred to as a second-order uncertainty fuzzy set model.
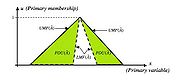 The FOU represents the blurring of a type-1 membership function, and is completely described by its two bounding functions (Fig. 2), a lower membership function (LMF) and an upper membership function (UMF), both of which are type-1 fuzzy sets! Consequently, it is possible to use type-1 fuzzy set mathematics to characterize and work with interval type-2 fuzzy sets. This means that engineers and scientists who already know type-1 fuzzy sets will not have to invest a lot of time learning about general type-2 fuzzy set mathematics in order to understand and use interval type-2 fuzzy sets.
The FOU represents the blurring of a type-1 membership function, and is completely described by its two bounding functions (Fig. 2), a lower membership function (LMF) and an upper membership function (UMF), both of which are type-1 fuzzy sets! Consequently, it is possible to use type-1 fuzzy set mathematics to characterize and work with interval type-2 fuzzy sets. This means that engineers and scientists who already know type-1 fuzzy sets will not have to invest a lot of time learning about general type-2 fuzzy set mathematics in order to understand and use interval type-2 fuzzy sets.
Work on type-2 fuzzy sets languished during the 1980’s and early-to-mid 1990’s, although a small number of articles were published about them. People were still trying to figure out what to do with type-1 fuzzy sets, so even though Zadeh proposed type-2 fuzzy sets in 1976, the time was not right for researchers to drop what they were doing with type-1 fuzzy sets to focus on type-2 fuzzy sets. This changed in the latter part of the 1990’s as a result of Prof. Jerry Mendel and his student’s works on type-2 fuzzy sets and systems (e.g., [12]). Since then, more and more researchers around the world are writing articles about type-2 fuzzy sets and systems.
—is much simpler than the mathematics that is needed for general type-2 fuzzy sets. So, the literature about interval type-2 fuzzy sets is large, whereas the literature about general type-2 fuzzy sets is much smaller. Both kinds of fuzzy sets are being actively researched by an ever-growing number of researchers around the world.
Formulas for the following have already been worked out for interval type-2 fuzzy sets:
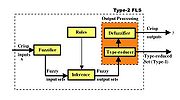 The following discussions, about the four components in the Fig. 3 rule-based FLS, are given for an interval type-2 FLS, because to-date they are the most popular kind of type-2 FLS; however, most of the discussions are also applicable for a general type-2 FLS.
The following discussions, about the four components in the Fig. 3 rule-based FLS, are given for an interval type-2 FLS, because to-date they are the most popular kind of type-2 FLS; however, most of the discussions are also applicable for a general type-2 FLS.
Rules, that are either provided by subject experts or are extracted from numerical data, are expressed as a collection of IF-THEN statements, e.g.,
Fuzzy sets are associated with the terms that appear in the antecedents (IF-part) or consequents (THEN-part) of rules, and with the inputs to and the outputs of the FLS. Membership functions are used to describe these fuzzy sets, and in a type-1 FLS they are all type-1 fuzzy sets, whereas in an interval type-2 FLS at least one membership function is an interval type-2 fuzzy set.
An interval type-2 FLS lets any one or all of the following kinds of uncertainties be quantified:
In Fig. 3, measured (crisp) inputs are first transformed into fuzzy sets in the Fuzzifier block because it is fuzzy sets and not numbers that activate the rules which are described in terms of fuzzy sets and not numbers. Three kinds of fuzzifiers are possible in an interval type-2 FLS. When measurements are:
In Fig. 3, after measurements are fuzzified, the resulting input fuzzy sets are mapped into fuzzy output sets by the Inference block. This is accomplished by first quantifying each rule using fuzzy set theory, and by then using the mathematics of fuzzy sets to establish the output of each rule, with the help of an inference mechanism. If there are M rules then the fuzzy input sets to the Inference block will activate only a subset of those rules, where the subset contains at least one rule and usually way fewer than M rules. Inference is done one rule at a time. So, at the output of the Inference block, there will be one or more fired-rule fuzzy output sets.
In most engineering applications of a FLS, a number (and not a fuzzy set) is needed as its final output, e.g., the consequent of the rule given above is “Rotate the valve a bit to the right.” No automatic valve will know what this means because “a bit to the right” is a linguistic expression, and a valve must be turned by numerical values, i.e. by a certain number of degrees. Consequently, the fired-rule output fuzzy sets have to be converted into a number, and this is done in the Fig. 3 Output Processing block.
In a type-1 FLS, output processing, called Defuzzification
, maps a type-1 fuzzy set into a number. There are many ways for doing this, e.g., compute the union of the fired-rule output fuzzy sets (the result is another type-1 fuzzy set) and then compute the center of gravity of the membership function for that set; compute a weighted average of the center of gravities of each of the fired rule consequent membership functions; etc.
Things are somewhat more complicated for an interval type-2 FLS, because to go from an interval type-2 fuzzy set to a number (usually) requires two steps (Fig. 3). The first step, called type-reduction, is where an interval type-2 fuzzy set is reduced to an interval-valued type-1 fuzzy set. There are as many type-reduction methods as there are type-1 defuzzification methods. An algorithm developed by Karnik and Mendel ([7], [12]) now known as the KM Algorithm is used for type-reduction. Although this algorithm is iterative, it is very fast.
The second step of Output Processing, which occurs after type-reduction, is still called defuzzification. Because a type-reduced set of an interval type-2 fuzzy set is always a finite interval of numbers, the defuzzified value is just the average of the two end-points of this interval.
It is clear from Fig. 3 that there can be two outputs to an interval type-2 FLS—crisp numerical values and the type-reduced set. The latter provides a measure of the uncertainties that have flowed through the interval type-2 FLS, due to the (possibly) uncertain input measurements that have activated rules whose antecedents or consequents or both are uncertain. Just as standard deviation is widely used in probability and statistics to provide a measure of unpredictable uncertainty about a mean value, the type-reduced set can provided a measure of uncertainty about the crisp output of an interval type-2 FLS.
Of course, he did not mean that computers would actually compute using words—single words or phrases—rather than numbers. He meant that computers would be activated by words, which would be converted into a mathematical representation using fuzzy sets and that these fuzzy sets would be mapped by a CWW engine into some other fuzzy set after which the latter would be converted back into a word. A natural question to ask is: Which kind of fuzzy set—type-1 or type-2—should be used as a model for a word? Mendel ([13], 16]) has argued, on the basis of Karl Popper
’s concept of Falsificationism ([19], 30]), that using a type-1 fuzzy set as a model for a word is scientifically incorrect. An interval type-2 fuzzy set should be used as a (first-order uncertainty) model for a word. Much research is under way about CWW.
Fuzzy Sets and Systems
Fuzzy Sets and Systems is a peer-reviewed international scientific journal published by Elsevier on behalf of the International Fuzzy Systems Association and was founded in 1978. The editors-in-chief are Bernard De Baets of the Dept...
so that more uncertainty can be handled. From the very beginning of fuzzy sets, criticism was made about the fact that the membership function of a type-1 fuzzy set has no uncertainty associated with it, something that seems to contradict the word fuzzy, since that word has the connotation of lots of uncertainty. So, what does one do when there is uncertainty about the value of the membership function? The answer to this question was provided in 1975 by the inventor of fuzzy sets, Prof. Lotfi A. Zadeh [27], when he proposed more sophisticated kinds of fuzzy sets, the first of which he called a type-2 fuzzy set. A type-2 fuzzy set lets us incorporate uncertainty about the membership function into fuzzy set theory, and is a way to address the above criticism of type-1 fuzzy sets head-on. And, if there is no uncertainty, then a type-2 fuzzy set reduces to a type-1 fuzzy set, which is analogous to probability reducing to determinism when unpredictability vanishes.
In order to symbolically distinguish between a type-1 fuzzy set and a type-2 fuzzy set, a tilde symbol is put over the symbol for the fuzzy set; so, A denotes a type-1 fuzzy set, whereas à denotes the comparable type-2 fuzzy set. In the following discussions it is names may be used, they are the same fuzzy set). When the latter is done, the resulting type-2 fuzzy set is called a general type-2 fuzzy set (to distinguish it from the special interval type-2 fuzzy set).
Prof. Zadeh didn’t stop with type-2 fuzzy sets, because in that 1976 paper [27] he also generalized all of this to type-n fuzzy sets. The present article focuses only on type-2 fuzzy sets because they are the next step in the logical progression from type-1 to type-n fuzzy sets, where n = 1, 2, … . Although some researchers are beginning to explore higher than type-2 fuzzy sets, as of early 2009, this work is in its infancy.
For an interval type-2 fuzzy set that third-dimension value is the same (e.g., 1) everywhere, which means that no new information is contained in the third dimension of an interval type-2 fuzzy set. So, for such a set, the third dimension is ignored, and only the FOU is used to describe it. It is for this reason that an interval type-2 fuzzy set is sometimes called a first-order uncertainty fuzzy set model, whereas a general type-2 fuzzy set (with its useful third-dimension) is sometimes referred to as a second-order uncertainty fuzzy set model.
Work on type-2 fuzzy sets languished during the 1980’s and early-to-mid 1990’s, although a small number of articles were published about them. People were still trying to figure out what to do with type-1 fuzzy sets, so even though Zadeh proposed type-2 fuzzy sets in 1976, the time was not right for researchers to drop what they were doing with type-1 fuzzy sets to focus on type-2 fuzzy sets. This changed in the latter part of the 1990’s as a result of Prof. Jerry Mendel and his student’s works on type-2 fuzzy sets and systems (e.g., [12]). Since then, more and more researchers around the world are writing articles about type-2 fuzzy sets and systems.
Interval Type-2 Fuzzy Sets
Interval type-2 fuzzy sets have received the most attention because the mathematics that is needed for such sets—primarily Interval arithmeticInterval arithmetic
Interval arithmetic, interval mathematics, interval analysis, or interval computation, is a method developed by mathematicians since the 1950s and 1960s as an approach to putting bounds on rounding errors and measurement errors in mathematical computation and thus developing numerical methods that...
—is much simpler than the mathematics that is needed for general type-2 fuzzy sets. So, the literature about interval type-2 fuzzy sets is large, whereas the literature about general type-2 fuzzy sets is much smaller. Both kinds of fuzzy sets are being actively researched by an ever-growing number of researchers around the world.
Formulas for the following have already been worked out for interval type-2 fuzzy sets:
- Fuzzy set operationsFuzzy set operationsA fuzzy set operation is an operation on fuzzy sets. These operations are generalization of crisp set operations. There is more than one possible generalization. The most widely used operations are called standard fuzzy set operations...
: union, intersection and complement ([6], [12]) - Centroid (a very widely used operation by practitioners of such sets, and also an important uncertainty measure for them) ([7], [12])
- Other uncertainty measures [fuzziness, cardinality, variance and skewness [22] and uncertainty bounds [26]
- Similarity ([1], [24], [25])
- Subsethood [21]
- Fuzzy set ranking [25]
- Fuzzy rule ranking and selection [31]
- Type-reduction methods ([7], [12])
- Firing intervals for an interval type-2 fuzzy logic system ([3], [8], [12])
- Fuzzy weighted average [9]
- Linguistic weighted average [23]
- Synthesizing an FOU from data that are collected from a group of subject [10]
Interval Type-2 Fuzzy Logic Systems
Type-2 fuzzy sets are finding very wide applicability in rule-based fuzzy logic systems (FLSs) because they let uncertainties be modeled by them whereas such uncertainties cannot be modeled by type-1 fuzzy sets. A block diagram of a type-2 FLS is depicted in Fig. 3. This kind of FLS is used in fuzzy logic control, fuzzy logic signal processing, rule-based classification, etc., and is sometimes referred to as a function approximation application of fuzzy sets, because the FLS is designed to minimize an error function.Rules, that are either provided by subject experts or are extracted from numerical data, are expressed as a collection of IF-THEN statements, e.g.,
- IF temperature is moderate and pressure is high, then rotate the valve a bit to the right.
Fuzzy sets are associated with the terms that appear in the antecedents (IF-part) or consequents (THEN-part) of rules, and with the inputs to and the outputs of the FLS. Membership functions are used to describe these fuzzy sets, and in a type-1 FLS they are all type-1 fuzzy sets, whereas in an interval type-2 FLS at least one membership function is an interval type-2 fuzzy set.
An interval type-2 FLS lets any one or all of the following kinds of uncertainties be quantified:
- Words that are used in antecedents and consequents of rules—because words can mean different things to different people.
- Uncertain consequents—because when rules are obtained from a group of experts, consequents will often be different for the same rule, i.e. the experts will not necessarily be in agreement.
- Membership function parameters—because when those parameters are optimized using uncertain (noisy) training data, the parameters become uncertain.
- Noisy measurements—because very often it is such measurements that activate the FLS.
In Fig. 3, measured (crisp) inputs are first transformed into fuzzy sets in the Fuzzifier block because it is fuzzy sets and not numbers that activate the rules which are described in terms of fuzzy sets and not numbers. Three kinds of fuzzifiers are possible in an interval type-2 FLS. When measurements are:
- Perfect, they are modeled as a crisp set;
- Noisy, but the noise is stationary, they are modeled as a type-1 fuzzy set; and,
- Noisy, but the noise is non-stationary, they are modeled as an interval type-2 fuzzy set (this latter kind of fuzzification cannot be done in a type-1 FLS).
In Fig. 3, after measurements are fuzzified, the resulting input fuzzy sets are mapped into fuzzy output sets by the Inference block. This is accomplished by first quantifying each rule using fuzzy set theory, and by then using the mathematics of fuzzy sets to establish the output of each rule, with the help of an inference mechanism. If there are M rules then the fuzzy input sets to the Inference block will activate only a subset of those rules, where the subset contains at least one rule and usually way fewer than M rules. Inference is done one rule at a time. So, at the output of the Inference block, there will be one or more fired-rule fuzzy output sets.
In most engineering applications of a FLS, a number (and not a fuzzy set) is needed as its final output, e.g., the consequent of the rule given above is “Rotate the valve a bit to the right.” No automatic valve will know what this means because “a bit to the right” is a linguistic expression, and a valve must be turned by numerical values, i.e. by a certain number of degrees. Consequently, the fired-rule output fuzzy sets have to be converted into a number, and this is done in the Fig. 3 Output Processing block.
In a type-1 FLS, output processing, called Defuzzification
Defuzzification
Defuzzification is the process of producing a quantifiable result in fuzzy logic, given fuzzy sets and corresponding membership degrees. It is typically needed in fuzzy control systems. These will have a number of rules that transform a number of variables into a fuzzy result, that is, the result...
, maps a type-1 fuzzy set into a number. There are many ways for doing this, e.g., compute the union of the fired-rule output fuzzy sets (the result is another type-1 fuzzy set) and then compute the center of gravity of the membership function for that set; compute a weighted average of the center of gravities of each of the fired rule consequent membership functions; etc.
Things are somewhat more complicated for an interval type-2 FLS, because to go from an interval type-2 fuzzy set to a number (usually) requires two steps (Fig. 3). The first step, called type-reduction, is where an interval type-2 fuzzy set is reduced to an interval-valued type-1 fuzzy set. There are as many type-reduction methods as there are type-1 defuzzification methods. An algorithm developed by Karnik and Mendel ([7], [12]) now known as the KM Algorithm is used for type-reduction. Although this algorithm is iterative, it is very fast.
The second step of Output Processing, which occurs after type-reduction, is still called defuzzification. Because a type-reduced set of an interval type-2 fuzzy set is always a finite interval of numbers, the defuzzified value is just the average of the two end-points of this interval.
It is clear from Fig. 3 that there can be two outputs to an interval type-2 FLS—crisp numerical values and the type-reduced set. The latter provides a measure of the uncertainties that have flowed through the interval type-2 FLS, due to the (possibly) uncertain input measurements that have activated rules whose antecedents or consequents or both are uncertain. Just as standard deviation is widely used in probability and statistics to provide a measure of unpredictable uncertainty about a mean value, the type-reduced set can provided a measure of uncertainty about the crisp output of an interval type-2 FLS.
Computing with words
Another application for fuzzy sets has also been inspired by Prof. Zadeh ([28]–[30])—Computing With Words. Different acronyms have been used for “computing with words,” e.g., CW and CWW. According to Zadeh:- CWW is a methodology in which the objects of computation are words and propositions drawn from a natural language. [It is] inspired by the remarkable human capability to perform a wide variety of physical and mental tasks without any measurements and any computations.
Of course, he did not mean that computers would actually compute using words—single words or phrases—rather than numbers. He meant that computers would be activated by words, which would be converted into a mathematical representation using fuzzy sets and that these fuzzy sets would be mapped by a CWW engine into some other fuzzy set after which the latter would be converted back into a word. A natural question to ask is: Which kind of fuzzy set—type-1 or type-2—should be used as a model for a word? Mendel ([13], 16]) has argued, on the basis of Karl Popper
Karl Popper
Sir Karl Raimund Popper, CH FRS FBA was an Austro-British philosopher and a professor at the London School of Economics...
’s concept of Falsificationism ([19], 30]), that using a type-1 fuzzy set as a model for a word is scientifically incorrect. An interval type-2 fuzzy set should be used as a (first-order uncertainty) model for a word. Much research is under way about CWW.
Further reading
- For the reader who is new to interval type-2 fuzzy sets and systems and wants to learn more about them, without getting into lots of details, the easiest way to do this is to read Mendel’s 2007 magazine article [14], or Wu's brief tutorial on interval type-2 fuzzy sets and systems. The latter also contains a Matlab implementation of interval type-2 fuzzy logic systems.
- For the reader who is new to interval type-2 fuzzy sets and systems and wants to learn more about them, with lots of details, but does not want to first learn about general type-2 fuzzy sets and systems, the easiest way to do this is to read the journal article by Mendel, John and Liu [18].
- For the reader who is new to type-2 fuzzy sets and systems and wants to learn more about them, wants all of the details, wants a top-down presentation—from general type-2 to interval type-2—, and wants to see how they compare with type-1 fuzzy sets and systems, the easiest way to do this is to read Mendel’s 2001 textbook [12].
- For the reader who wants to learn about a very powerful and useful representation for general type-2 fuzzy sets, in terms of simpler type-2 fuzzy sets that are called embedded type-2 fuzzy sets, read the paper by Mendel and John [17].
- For the reader who may already be familiar with type-2 fuzzy sets and systems and who wants to know what has happened since the 2001 publication of Mendel’s book, see Mendel’s 2007 journal article [15] and also the 2008 book by Castillo and Melin [2].
- The February 2007 issue of the IEEE Computational Intelligence Magazine is a special issue that is about type-2 fuzzy sets and systems. This issue contains articles (see the reference list below) about:
- The history of type-2 fuzzy logic, by Bob John and Simon Coupland [5]
- Type-2 fuzzy logic controllers, by Hani Hagras [4]
- Fuzzy clustering using type-2 fuzzy sets, by Frank Rhee [20]
- Hardware implementation for a type-2 fuzzy system, by Miguel Melgarejo [11]
External links
- The type-2 website http://www.type2fuzzylogic.org is loaded with references and is being continually updated with new ones.
- There are two IEEE Expert Now multi-media modules that can be accessed from the IEEE at: http://www.ieee.org/web/education/Expert_Now_IEEE/Catalog/AI.html
- “Introduction to Type-2 Fuzzy Sets and Systems” by Jerry Mendel, sponsored by the IEEE Computational Intelligence Society
- “Type-2 Fuzzy Logic Controllers: Towards a New Approach for Handling Uncertainties in Real World Environments” by Hani Hagras, sponsored by the IEEE Computational Intelligence Society
Software
Freeware MATLAB implementations, which cover general and interval type-2 fuzzy sets and systems, as well as type-1 fuzzy systems, are available at: http://sipi.usc.edu/~mendel/software.See also
- Computational intelligenceComputational intelligenceComputational intelligence is a set of Nature-inspired computational methodologies and approaches to address complex problems of the real world applications to which traditional methodologies and approaches are ineffective or infeasible. It primarily includes Fuzzy logic systems, Neural Networks...
- Expert systemExpert systemIn artificial intelligence, an expert system is a computer system that emulates the decision-making ability of a human expert. Expert systems are designed to solve complex problems by reasoning about knowledge, like an expert, and not by following the procedure of a developer as is the case in...
- Fuzzy control systemFuzzy control systemA fuzzy control system is a control system based on fuzzy logic—a mathematical system that analyzes analog input values in terms of logical variables that take on continuous values between 0 and 1, in contrast to classical or digital logic, which operates on discrete values of either 1 or 0 .-...
- Fuzzy logicFuzzy logicFuzzy logic is a form of many-valued logic; it deals with reasoning that is approximate rather than fixed and exact. In contrast with traditional logic theory, where binary sets have two-valued logic: true or false, fuzzy logic variables may have a truth value that ranges in degree between 0 and 1...
- Fuzzy setFuzzy setFuzzy sets are sets whose elements have degrees of membership. Fuzzy sets were introduced simultaneously by Lotfi A. Zadeh and Dieter Klaua in 1965 as an extension of the classical notion of set. In classical set theory, the membership of elements in a set is assessed in binary terms according to...
- Granular computingGranular computingGranular computing is an emerging computing paradigm of information processing. It concerns the processing of complex information entities called information granules, which arise in the process of data abstraction and derivation of knowledge from information...
- Perceptual ComputingPerceptual ComputingPerceptual Computing is an application of Zadeh's theory of computing with words on the field of assisting people to make subjective judgments.-Perceptual Computer:...
- Rough setRough setIn computer science, a rough set, first described by a Polish computer scientist Zdzisław I. Pawlak, is a formal approximation of a crisp set in terms of a pair of sets which give the lower and the upper approximation of the original set...
- Soft computingSoft computingSoft computing is a term applied to a field within computer science which is characterized by the use of inexact solutions to computationally-hard tasks such as the solution of NP-complete problems, for which an exact solution cannot be derived in polynomial time.-Introduction:Soft Computing became...
- VaguenessVaguenessThe term vagueness denotes a property of concepts . A concept is vague:* if the concept's extension is unclear;* if there are objects which one cannot say with certainty whether belong to a group of objects which are identified with this concept or which exhibit characteristics that have this...