

Epipolar geometry
Encyclopedia
Pinhole camera model
The pinhole camera model describes the mathematical relationship between the coordinates of a 3D point and its projection onto the image plane of an ideal pinhole camera, where the camera aperture is described as a point and no lenses are used to focus light...
.
Epipolar geometry
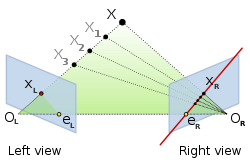
The figure below depicts two pinhole cameras looking at point X. In real cameras, the image plane is actually behind the center of projection, and produces a rotated image. Here, however, the projection problem is simplified by placing a virtual image plane in front of the center of projection of each camera to produce an unrotated image. OL and OR represent the centers of projection of the two cameras. X represents the point of interest in both cameras. Points xL and xR are the projections of point X onto the image planes.Each camera captures a 2D image of the 3D world. This conversion from 3D to 2D is referred to as a perspective projection and is described by the pinhole camera model. It is common to model this projection operation by rays that emanate from the camera, passing through its center of projection. Note that each emanating ray corresponds to a single point in the image.
Epipole or epipolar point
Since the centers of projection of the cameras are distinct, each center of projection projects onto a distinct point into the other camera's image plane. These two image points are denoted by eL and eR and are called epipoles or epipolar points. Both epipoles eL and eR in their respective image planes and both centers of projection OL and OR lie on a single 3D line.Epipolar line
The line OL–X is seen by the left camera as a point because it is directly in line with that camera's center of projection. However, the right camera sees this line as a line in its image plane. That line (eR–xR) in the right camera is called an epipolar line. Symmetrically, the line OR–X seen by the right camera as a point is seen as epipolar line eL–xLby the left camera.An epipolar line is a function of the 3D point X, i.e. there is a set of epipolar lines in both images if we allow X to vary over all 3D points. Since the 3D line
OL–X passes through the center of projection OL, the corresponding epipolar line in the right image must pass through the epipole eR (and correspondingly for epipolar lines in the left image). This means that all epipolar lines in one image must intersect the epipolar point of that image. In fact, any line which intersects with the epipolar point is an epipolar line since it can be derived from some 3D point X.
Epipolar plane
As an alternative visualization, consider the points X, OL & OR that form a plane called the epipolar plane. The epipolar plane intersects each camera's image plane where it forms lines—the epipolar lines. All epipolar planes and epipolar lines intersect the epipole regardless of where X is located.Epipolar constraint and triangulation
- If the projection point xL is known, then the epipolar line eR–xR is known and the point X projects into the right image, on a point xR which must lie on this particular epipolar line. This means that for each point observed in one image the same point must be observed in the other image on a known epipolar line. This provides an epipolar constraint which corresponding image points must satisfy and it means that it is possible to test if two points really correspond to the same 3D point. Epipolar constraints can also be described by the essential matrix or the fundamental matrix between the two cameras.
- If the points xL and xR are known, their projection lines are also known. If the two image points correspond to the same 3D point X the projection lines must intersect precisely at X. This means that X can be calculated from the coordinates of the two image points, a process called triangulationTriangulation (computer vision)In computer vision triangulation refers to the process of determining a point in 3D space given its projections onto two, or more, images. In order to solve this problem it is necessary to know the parameters of the camera projection function from 3D to 2D for the cameras involved, in the simplest...
.
Simplified cases
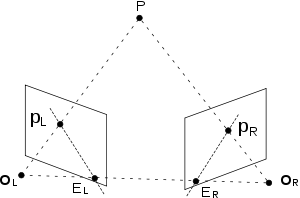
Image rectification
Image rectification is a transformation process used to project two-or-more images onto a common image plane. It corrects image distortion by transforming the image into a standard coordinate system....
.