

Ordered dithering
Encyclopedia

Microsoft Windows
Microsoft Windows is a series of operating systems produced by Microsoft.Microsoft introduced an operating environment named Windows on November 20, 1985 as an add-on to MS-DOS in response to the growing interest in graphical user interfaces . Microsoft Windows came to dominate the world's personal...
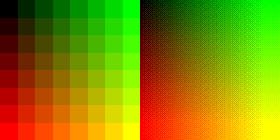
uses it in 16-color graphics modes. It is easily distinguished by its noticeable crosshatch patterns.
The algorithm achieves dithering by applying a threshold map on the pixels displayed, causing some of the pixels to be rendered at a different color, depending on how far in between the color is of available color entries.
Different sizes of threshold maps exist:
   |  |
The map may be rotated or mirrored without affecting the power of the algorithm. This threshold map is also known as an index matrix or Bayer matrix.
Arbitrary size threshold maps can be devised with a simple rule: First fill each slot with a successive integer starting from 1. Then reorder them such that the average distance between two successive numbers in the map is as large as possible, paying attention to that the table "wraps" around at edges.
The algorithm renders the image normally, but for each pixel, it adds a value from the threshold map, causing the pixel's value to be quantized one step higher if it exceeds the threshold.
For example, in monochrome rendering, if the value of the pixel (scaled into the 0-9 range) is less than the number in the corresponding cell of the matrix, plot that pixel black, otherwise, plot it white.
Pseudocode
In computer science and numerical computation, pseudocode is a compact and informal high-level description of the operating principle of a computer program or other algorithm. It uses the structural conventions of a programming language, but is intended for human reading rather than machine reading...
:
for each y
for each x
oldpixel := pixel[x][y] + threshold_map_4x4[x mod 4][y mod 4]
newpixel := find_closest_palette_color(oldpixel)
pixel[x][y] := newpixel
The values read from the threshold map should scale into the same range as is the minimal difference between distinct colors in the target palette.
Because the algorithm operates on single pixels and has no conditional statements, it is very fast and suitable for real-time transformations. Additionally, because the location of the dithering patterns stays always the same relative to the display frame, it is less prone to jitter than error-diffusion methods, making it suitable for animations.
The size of the map selected should be equal to or larger than the ratio of source colors to target colors. For example, when quantizing a 24bpp image to 15bpp (256 colors per channel to 32 colors per channel), the smallest map one would choose would be 4x2, for the ratio of 8 (256:32). This allows expressing each distinct tone of the input with different dithering patterns.