

Simple machine
Encyclopedia
Force
In physics, a force is any influence that causes an object to undergo a change in speed, a change in direction, or a change in shape. In other words, a force is that which can cause an object with mass to change its velocity , i.e., to accelerate, or which can cause a flexible object to deform...
.
In general, they can be defined as the simplest mechanisms that use mechanical advantage
Mechanical advantage
Mechanical advantage is a measure of the force amplification achieved by using a tool, mechanical device or machine system. Ideally, the device preserves the input power and simply trades off forces against movement to obtain a desired amplification in the output force...
(also called lever
Lever
In physics, a lever is a rigid object that is used with an appropriate fulcrum or pivot point to either multiply the mechanical force that can be applied to another object or resistance force , or multiply the distance and speed at which the opposite end of the rigid object travels.This leverage...
age) to multiply force. A simple machine uses a single applied force to do work
Mechanical work
In physics, work is a scalar quantity that can be described as the product of a force times the distance through which it acts, and it is called the work of the force. Only the component of a force in the direction of the movement of its point of application does work...
against a single load force. Ignoring friction
Friction
Friction is the force resisting the relative motion of solid surfaces, fluid layers, and/or material elements sliding against each other. There are several types of friction:...
losses, the work done on the load is equal to the work done by the applied force. They can be used to increase the amount of the output force, at the cost of a proportional decrease in the distance moved by the load. The ratio of the output to the input force is called the mechanical advantage.
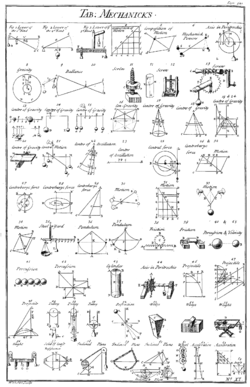
Usually the term refers to the six classical simple machines which were defined by Renaissance
Renaissance
The Renaissance was a cultural movement that spanned roughly the 14th to the 17th century, beginning in Italy in the Late Middle Ages and later spreading to the rest of Europe. The term is also used more loosely to refer to the historical era, but since the changes of the Renaissance were not...
scientists:
- LeverLeverIn physics, a lever is a rigid object that is used with an appropriate fulcrum or pivot point to either multiply the mechanical force that can be applied to another object or resistance force , or multiply the distance and speed at which the opposite end of the rigid object travels.This leverage...
- Wheel and axleWheel and axleThe wheel and axle is one of six simple machines developed in ancient times and is in the category of a second- or third-class lever. In its simplest form it consists of a rod attached to a wheel so that their movements are coupled when one of the parts is turned...
- PulleyPulleyA pulley, also called a sheave or a drum, is a mechanism composed of a wheel on an axle or shaft that may have a groove between two flanges around its circumference. A rope, cable, belt, or chain usually runs over the wheel and inside the groove, if present...
- Inclined planeInclined planeThe inclined plane is one of the original six simple machines; as the name suggests, it is a flat surface whose endpoints are at different heights. By moving an object up an inclined plane rather than completely vertical, the amount of force required is reduced, at the expense of increasing the...
- Wedge
- ScrewScrew (simple machine)A screw is a mechanism that converts rotational motion to linear motion, and a torque to a linear force. It is one of the six classical simple machines. The most common form consists of a cylindrical shaft with helical grooves or ridges called threads around the outside...
Simple machines are the elementary "building blocks" of which all more complicated machine
Machine
A machine manages power to accomplish a task, examples include, a mechanical system, a computing system, an electronic system, and a molecular machine. In common usage, the meaning is that of a device having parts that perform or assist in performing any type of work...
s (sometimes called "compound machines") are composed. For example, wheels, levers, and pulleys are all used in the mechanism of a bicycle
Bicycle
A bicycle, also known as a bike, pushbike or cycle, is a human-powered, pedal-driven, single-track vehicle, having two wheels attached to a frame, one behind the other. A person who rides a bicycle is called a cyclist, or bicyclist....
. The mechanical advantage of a compound machine is just the product of the mechanical advantages of the simple machines of which it is composed.
Simple machines fall into two classes; those dependent on the vector resolution of forces (inclined plane, wedge, screw) and those in which there is an equilibrium
Mechanical equilibrium
A standard definition of static equilibrium is:This is a strict definition, and often the term "static equilibrium" is used in a more relaxed manner interchangeably with "mechanical equilibrium", as defined next....
of torque
Torque
Torque, moment or moment of force , is the tendency of a force to rotate an object about an axis, fulcrum, or pivot. Just as a force is a push or a pull, a torque can be thought of as a twist....
s (lever, pulley, wheel).
History
The idea of a "simple machine" originated with the Greek philosopher ArchimedesArchimedes
Archimedes of Syracuse was a Greek mathematician, physicist, engineer, inventor, and astronomer. Although few details of his life are known, he is regarded as one of the leading scientists in classical antiquity. Among his advances in physics are the foundations of hydrostatics, statics and an...
around the 3rd century BC, who studied the "Archimedean" simple machines: lever, pulley, and screw. He discovered the principle of mechanical advantage
Mechanical advantage
Mechanical advantage is a measure of the force amplification achieved by using a tool, mechanical device or machine system. Ideally, the device preserves the input power and simply trades off forces against movement to obtain a desired amplification in the output force...
in the lever. Later Greek philosophers defined the classic five simple machines (excluding the inclined plane
Inclined plane
The inclined plane is one of the original six simple machines; as the name suggests, it is a flat surface whose endpoints are at different heights. By moving an object up an inclined plane rather than completely vertical, the amount of force required is reduced, at the expense of increasing the...
) and were able to roughly calculate their mechanical advantage. Heron of Alexandria (ca. 10–75 AD) in his work Mechanics lists five mechanisms that can "set a load in motion"; lever, windlass, pulley, wedge, and screw, and describes their fabrication and uses. However the Greeks' understanding was limited to the statics
Statics
Statics is the branch of mechanics concerned with the analysis of loads on physical systems in static equilibrium, that is, in a state where the relative positions of subsystems do not vary over time, or where components and structures are at a constant velocity...
of simple machines; the balance of forces, and did not include dynamics
Dynamics
Dynamics may refer to:-Physics and engineering:* Dynamics , the time evolution of physical processes** Aerodynamics, the study of gases in motion...
; the tradeoff between force and distance, or the concept of work
Work
Work may refer to:Human labor:* Employment* House work* Labor , measure of the work done by human beings* Manual labor, physical work done by people* Wage labor, in which a worker sells their labor and an employer buys it...
.
During the Renaissance
Renaissance
The Renaissance was a cultural movement that spanned roughly the 14th to the 17th century, beginning in Italy in the Late Middle Ages and later spreading to the rest of Europe. The term is also used more loosely to refer to the historical era, but since the changes of the Renaissance were not...
the dynamics of the Mechanical Powers, as the simple machines were called, began to be studied from the standpoint of how much useful work they could perform, leading eventually to the new concept of mechanical work. In 1586 Flemish engineer Simon Stevin
Simon Stevin
Simon Stevin was a Flemish mathematician and military engineer. He was active in a great many areas of science and engineering, both theoretical and practical...
derived the mechanical advantage of the inclined plane, and it was included with the other simple machines. The complete dynamic theory of simple machines was worked out by Italian scientist Galileo Galilei
Galileo Galilei
Galileo Galilei , was an Italian physicist, mathematician, astronomer, and philosopher who played a major role in the Scientific Revolution. His achievements include improvements to the telescope and consequent astronomical observations and support for Copernicanism...
in 1600 in Le Meccaniche ("On Mechanics"). He was the first to understand that simple machines do not create energy
Energy
In physics, energy is an indirectly observed quantity. It is often understood as the ability a physical system has to do work on other physical systems...
, only transform it.
The classic rules of sliding friction
Friction
Friction is the force resisting the relative motion of solid surfaces, fluid layers, and/or material elements sliding against each other. There are several types of friction:...
in machines were discovered by Leonardo Da Vinci
Leonardo da Vinci
Leonardo di ser Piero da Vinci was an Italian Renaissance polymath: painter, sculptor, architect, musician, scientist, mathematician, engineer, inventor, anatomist, geologist, cartographer, botanist and writer whose genius, perhaps more than that of any other figure, epitomized the Renaissance...
(1452–1519), but remained unpublished in his notebooks. They were rediscovered by Guillaume Amontons
Guillaume Amontons
Guillaume Amontons was a French scientific instrument inventor and physicist. He was one of the pioneers in tribology, apart from Leonardo da Vinci, John Theophilus Desaguliers, Leonard Euler and Charles-Augustin de Coulomb.-Life:Guillaume was born in Paris, France. His father was a lawyer from...
(1699) and were further developed by Charles-Augustin de Coulomb
Charles-Augustin de Coulomb
Charles-Augustin de Coulomb was a French physicist. He is best known for developing Coulomb's law, the definition of the electrostatic force of attraction and repulsion. The [SI unit] of charge, the coulomb, was named after him....
(1785).
Alternate definitions
Any list of simple machines is somewhat arbitrary; the central idea is that every mechanism that manipulates force should be able to be understood as a combination of devices on the list. Some variations that have been proposed to the classical list of six simple machines:- Some exclude the wedge from the list of simple machines, as it is a moving inclined plane.
- The screw, being a helical inclined plane, is sometimes also excluded. This position is less accepted because a screw converts a rotational force (torqueTorqueTorque, moment or moment of force , is the tendency of a force to rotate an object about an axis, fulcrum, or pivot. Just as a force is a push or a pull, a torque can be thought of as a twist....
) to a linear force. - It has been said that the pulley, and wheel and axle can be viewed as unique forms of levers, leaving only the lever and the inclined plane as simple machines from which all others can be derived.
- Hydraulic systems can also provide amplification of force, so some say they should be added to the list.
Frictionless analysis
Although each machine works differently, the way they function is similar mathematically. In each machine, a force is applied to the device at one point, and it does work
is applied to the device at one point, and it does workMechanical work
In physics, work is a scalar quantity that can be described as the product of a force times the distance through which it acts, and it is called the work of the force. Only the component of a force in the direction of the movement of its point of application does work...
moving a load,
 at another point. Although some machines only change the direction of the force, such as a stationary pulley, most machines multiply (or divide) the magnitude of the force by a factor, the mechanical advantage
at another point. Although some machines only change the direction of the force, such as a stationary pulley, most machines multiply (or divide) the magnitude of the force by a factor, the mechanical advantageMechanical advantage
Mechanical advantage is a measure of the force amplification achieved by using a tool, mechanical device or machine system. Ideally, the device preserves the input power and simply trades off forces against movement to obtain a desired amplification in the output force...
, that can be calculated from the machine's geometry. For example, the mechanical advantage of a lever
Lever
In physics, a lever is a rigid object that is used with an appropriate fulcrum or pivot point to either multiply the mechanical force that can be applied to another object or resistance force , or multiply the distance and speed at which the opposite end of the rigid object travels.This leverage...
is equal to the ratio of its lever arms.
Simple machines do not contain a source of energy
Energy
In physics, energy is an indirectly observed quantity. It is often understood as the ability a physical system has to do work on other physical systems...
, so they cannot do more work
Mechanical work
In physics, work is a scalar quantity that can be described as the product of a force times the distance through which it acts, and it is called the work of the force. Only the component of a force in the direction of the movement of its point of application does work...
than they receive from the input force. A simple machine with no friction
Friction
Friction is the force resisting the relative motion of solid surfaces, fluid layers, and/or material elements sliding against each other. There are several types of friction:...
or elasticity
Elasticity (physics)
In physics, elasticity is the physical property of a material that returns to its original shape after the stress that made it deform or distort is removed. The relative amount of deformation is called the strain....
is called an ideal machine. Due to conservation of energy
Conservation of energy
The nineteenth century law of conservation of energy is a law of physics. It states that the total amount of energy in an isolated system remains constant over time. The total energy is said to be conserved over time...
, in an ideal simple machine, the work output
 (that is done on the load) is equal to the work input
(that is done on the load) is equal to the work input  (from the applied force). The work is defined as the force multiplied by the distance it moves. So the applied force, times the distance the input point moves,
(from the applied force). The work is defined as the force multiplied by the distance it moves. So the applied force, times the distance the input point moves,  , must be equal to the load force, times the distance the load moves,
, must be equal to the load force, times the distance the load moves,  :
:

So the ratio of output to input force, the mechanical advantage
Mechanical advantage
Mechanical advantage is a measure of the force amplification achieved by using a tool, mechanical device or machine system. Ideally, the device preserves the input power and simply trades off forces against movement to obtain a desired amplification in the output force...
, of a frictionless machine is equal to the "distance ratio"; the ratio of input distance to output distance moved:
 (Ideal Mechanical Advantage)
(Ideal Mechanical Advantage)In the screw
Screw (simple machine)
A screw is a mechanism that converts rotational motion to linear motion, and a torque to a linear force. It is one of the six classical simple machines. The most common form consists of a cylindrical shaft with helical grooves or ridges called threads around the outside...
, which uses rotational motion, the input force should be replaced by the torque
Torque
Torque, moment or moment of force , is the tendency of a force to rotate an object about an axis, fulcrum, or pivot. Just as a force is a push or a pull, a torque can be thought of as a twist....
, and the distance by the angle
Angle
In geometry, an angle is the figure formed by two rays sharing a common endpoint, called the vertex of the angle.Angles are usually presumed to be in a Euclidean plane with the circle taken for standard with regard to direction. In fact, an angle is frequently viewed as a measure of an circular arc...
the shaft is turned.
Friction and efficiency
All actual machines have some frictionFriction
Friction is the force resisting the relative motion of solid surfaces, fluid layers, and/or material elements sliding against each other. There are several types of friction:...
. When friction is included, the mechanical advantage of a simple machine is no longer equal to the "distance ratio"
 but also depends on the machine's efficiency
but also depends on the machine's efficiencyMechanical efficiency
Mechanical efficiency measures the effectiveness of a machine in transforming the energy and power that is input to the device into an output force and movement...
. Due to conservation of energy
Conservation of energy
The nineteenth century law of conservation of energy is a law of physics. It states that the total amount of energy in an isolated system remains constant over time. The total energy is said to be conserved over time...
, in a machine with friction all the work done on the machine by the input force,
 goes into either moving the load
goes into either moving the load  or is dissipated as heat by friction
or is dissipated as heat by friction  .
. 
The efficiency
Mechanical efficiency
Mechanical efficiency measures the effectiveness of a machine in transforming the energy and power that is input to the device into an output force and movement...
η of a machine is a number between 0 and 1 defined as the ratio of output work to input work


Work is defined as the force multiplied by the distance moved, so
 and
and  , and thus
, and thus
 (Actual Mechanical Advantage)
(Actual Mechanical Advantage)So in all practical machines, the mechanical advantage is always less than the distance ratio, and equal to the distance ratio din/dout multiplied by the efficiency η. So a real machine, with friction, will not be able to move as large a load as a corresponding ideal frictionless machine using the same input force.
Self-locking machines
In many simple machines, if the load force Fout on the machine is high enough in relation to the input force Fin, the machine will move backwards, with the load force doing work on the input force. So these machines can be used in either direction, with the driving force applied to either input point. For example, if the load force on a lever is high enough, the lever will move backwards, moving the input arm backwards against the input force. These are called "reversible", "non-locking" or "overhauling" machines, and the backward motion is called "overhauling". However in some machines, if the frictional forces are high enough, no amount of load force can move it backwards, even if the input force is zero. This is called a "self-locking", "nonreversible", or "non-overhauling" machine. These machines can only be set in motion by a force at the input, and when the input force is removed will remain motionless, "locked" by friction at whatever position they were left.Self-locking occurs mainly in those machines which have large areas of sliding contact and therefore large frictional losses: the screw
Screw (simple machine)
A screw is a mechanism that converts rotational motion to linear motion, and a torque to a linear force. It is one of the six classical simple machines. The most common form consists of a cylindrical shaft with helical grooves or ridges called threads around the outside...
, inclined plane
Inclined plane
The inclined plane is one of the original six simple machines; as the name suggests, it is a flat surface whose endpoints are at different heights. By moving an object up an inclined plane rather than completely vertical, the amount of force required is reduced, at the expense of increasing the...
, and wedge:
- The most common example is a screw. In most screws, applying torque to the shaft can cause it to turn, moving the shaft linearly to do work against a load, but no amount of axial load force against the shaft will cause it to turn backwards.
- In an inclined plane, a load can be pulled up the plane by a sideways input force, but if the plane is not too steep and there is enough friction between load and plane, when the input force is removed the load will remain motionless and will not slide down the plane, regardless of its weight.
- A wedge can be driven into a block of wood by force on the end, such as from hitting it with a sledge hammer, forcing the sides apart, but no amount of compression force from the wood walls will cause it to pop back out of the block.
A machine will be self-locking if and only if its efficiency η is below 50%:

Whether a machine is self-locking depends on both the friction forces (coefficient of static friction) between its parts, and the distance ratio din/dout (ideal mechanical advantage). If both the friction and ideal mechanical advantage are high enough, it will self-lock.
Derivation
When a machine moves in the forward direction from point 1 to point 2, with the input force doing work on a load force, from conservation of energy
When it moves backward from point 2 to point 1 with the load force doing work on the input force, the work lost to friction Wfric is the same

When the input force is removed, the machine will self-lock if the work dissipated in friction is greater than the work done by the load force moving it backwards

From (1)



Compound machines
A compound machine is a machineMachine
A machine manages power to accomplish a task, examples include, a mechanical system, a computing system, an electronic system, and a molecular machine. In common usage, the meaning is that of a device having parts that perform or assist in performing any type of work...
made up of a number of simple machines connected in series, with the output force of each providing the input force for the next. For example a bench vise
Vise
Vise may refer to:* Miami Vise, a defunct AFL team* Vise , a mechanical screw apparatus* Vise , an architectural element* Venus In-Situ Explorer * The Vise, TV show* Visé, BelgiumPeople with the surname Vise:...
consists of a lever (the vise's handle) in series with a screw, and a car's transmission
Transmission (mechanics)
A machine consists of a power source and a power transmission system, which provides controlled application of the power. Merriam-Webster defines transmission as: an assembly of parts including the speed-changing gears and the propeller shaft by which the power is transmitted from an engine to a...
consists of a number of gear
Gear
A gear is a rotating machine part having cut teeth, or cogs, which mesh with another toothed part in order to transmit torque. Two or more gears working in tandem are called a transmission and can produce a mechanical advantage through a gear ratio and thus may be considered a simple machine....
s (wheels and axles
Wheel and axle
The wheel and axle is one of six simple machines developed in ancient times and is in the category of a second- or third-class lever. In its simplest form it consists of a rod attached to a wheel so that their movements are coupled when one of the parts is turned...
) in series. The mechanical advantage of the compound machine MAcompound is defined as the output force applied to the load by the last machine, divided by the input force applied to the first machine. As the force propagates through the machine, each simple machine scales the force by its own mechanical advantage, so the mechanical advantage of the compound machine is equal to the product of the mechanical advantages of each simple machine of which it is composed

Proof:

Since the output force of each machine is the input of the next:
 , so
, so

Similarly, the efficiency of the compound machine is equal to the product of the efficiencies of the simple machines
