
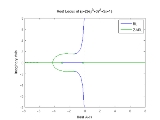
Root locus
Overview
Feedback
Feedback describes the situation when output from an event or phenomenon in the past will influence an occurrence or occurrences of the same Feedback describes the situation when output from (or information about the result of) an event or phenomenon in the past will influence an occurrence or...
system. This is a technique used in the field of control systems developed by Walter R. Evans
Walter R. Evans
Walter Richard Evans was a noted American control theorist and the inventor of the root locus method in 1948. He was the recipient of the 1987 American Society of Mechanical Engineers Rufus Oldenburger Medal and the 1988 AACC Richard E. Bellman Control Heritage Award.-Biography:He was born on...
.
In addition to determining the stability of the system, the root locus can be used to design for the damping ratio
Damping ratio
[[Image:Damped spring.gif|right|frame|Underdamped [[spring–mass system]] with ζ 1 , and is referred to as overdamped.*Underdamped:If s is a complex number, then the solution is a decaying exponential combined with an oscillatory portion that looks like \exp...
and natural frequency of a feedback system.