
Robotic paradigms
Encyclopedia
A robotic paradigm can be described by the relationship between the three primitives of robotics
: Sense
, Plan
, and Act. It can also be described by how sensory data is processed and distributed through the system, and where decisions are made.

Reactive Paradigm


Robotics
Robotics is the branch of technology that deals with the design, construction, operation, structural disposition, manufacture and application of robots...
: Sense
Sense
Senses are physiological capacities of organisms that provide inputs for perception. The senses and their operation, classification, and theory are overlapping topics studied by a variety of fields, most notably neuroscience, cognitive psychology , and philosophy of perception...
, Plan
Plan
A plan is typically any diagram or list of steps with timing and resources, used to achieve an objective. See also strategy. It is commonly understood as a temporal set of intended actions, through which one expects to achieve a goal...
, and Act. It can also be described by how sensory data is processed and distributed through the system, and where decisions are made.
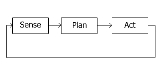
Hierarchical Paradigm
- The robot operates in a top-down fashion, heavy on planning.
- The robot senses the world, plans the next action, acts; at each step the robot explicitly plans the next move.
- All the sensing data tends to be gathered into one global world model.
Reactive ParadigmReactive planningIn artificial intelligence, reactive planning denotes a group of techniques for action selection by autonomous agents. These techniques differ from classical planning in two aspects. First, they operate in a timely fashion and hence can cope with highly dynamic and unpredictable environments....
- Sense-act type of organization.
- The robot has multiple instances of Sense-Act couplings.
- These couplings are concurrent processes, called behaviours, which take the local sensing data and compute the best action to take independently of what the other processes are doing.
- The robot will do a combination of behaviours.
Hybrid Deliberate/Reactive Paradigm
- The robot first plans (deliberates) how to best decompose a task into subtasks (also called “mission planning”) and then what are the suitable behaviours to accomplish each subtask.
- Then the behaviours starts executing as per the Reactive Paradigm.
- Sensing organization is also a mixture of Hierarchical and Reactive styles; sensor data gets routed to each behaviour that needs that sensor, but is also available to the planner for construction of a task-oriented global world model.
See also
- Behavior-based roboticsBehavior-based roboticsBehavior-based robotics or behavioral robotics is the branch of robotics that incorporates modular or behavior based AI .- How they work :...
- Subsumption architectureSubsumption architectureSubsumption architecture is a reactive robot architecture heavily associated with behavior-based robotics. The term was introduced by Rodney Brooks and colleagues in 1986...
- Hierarchical control systemHierarchical control systemA Hierarchical control system is a form of Control System in which a set of devices and governing software is arranged in a hierarchical tree. When the links in the tree are implemented by a computer network, then that hierarchical control system is also a form of Networked control system.-...