
Canny
Encyclopedia
The Canny edge detection
operator was developed by John F. Canny in 1986 and uses a multi-stage algorithm
to detect a wide range of edges in images. Most importantly, Canny also produced a computational theory of edge detection explaining why the technique works.
.png)
To satisfy these requirements Canny used the calculus of variations
– a technique which finds the function
which optimizes a given functional
. The optimal function in Canny's detector is described by the sum of four exponential
terms, but can be approximated by the first derivative
of a Gaussian.
.png) The Canny edge detector uses a filter based on the first derivative of a Gaussian, because it is susceptible to noise present on raw unprocessed image data, so to begin with, the raw image is convolved
The Canny edge detector uses a filter based on the first derivative of a Gaussian, because it is susceptible to noise present on raw unprocessed image data, so to begin with, the raw image is convolved
with a Gaussian filter. The result is a slightly blurred
version of the original which is not affected by a single noisy pixel to any significant degree.
Here is an example of a 5x5 Gaussian filter, used to create the image to the right, with = 1.4:
= 1.4:

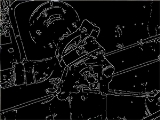
.png) An edge in an image may point in a variety of directions, so the Canny algorithm uses four filters to detect horizontal, vertical and diagonal edges in the blurred image. The edge detection operator
An edge in an image may point in a variety of directions, so the Canny algorithm uses four filters to detect horizontal, vertical and diagonal edges in the blurred image. The edge detection operator
(Roberts
, Prewitt
, Sobel for example) returns a value for the first derivative in the horizontal direction (Gy) and the vertical direction (Gx). From this the edge gradient and direction can be determined:


The edge direction angle is rounded to one of four angles representing vertical, horizontal and the two diagonals (0, 45, 90 and 135 degrees for example).
.png) Given estimates of the image gradients, a search is then carried out to determine if the gradient magnitude assumes a local maximum in the gradient direction. So, for example,
Given estimates of the image gradients, a search is then carried out to determine if the gradient magnitude assumes a local maximum in the gradient direction. So, for example,
From this stage referred to as non-maximum suppression, a set of edge points, in the form of a binary image
, is obtained. These are sometimes referred to as "thin edges".
.
Thresholding with hysteresis requires two thresholds – high and low. Making the assumption that important edges should be along continuous curves in the image allows us to follow a faint section of a given line and to discard a few noisy pixels that do not constitute a line but have produced large gradients. Therefore we begin by applying a high threshold. This marks out the edges we can be fairly sure are genuine. Starting from these, using the directional information derived earlier, edges can be traced through the image. While tracing an edge, we apply the lower threshold, allowing us to trace faint sections of edges as long as we find a starting point.
Once this process is complete we have a binary image where each pixel is marked as either an edge pixel or a non-edge pixel. From complementary output from the edge tracing step, the binary edge map obtained in this way can also be treated as a set of edge curves, which after further processing can be represented as polygons in the image domain.
finding the zero crossings of the 2nd derivative along the gradient direction, was shown
to be the result of minimizing a Kronrod-Minkowski functional while maximizing the integral
over the alignment of the edge with the gradient field (Kimmel and Bruckstein 2003). See article on
regularized Laplacian zero crossings and other optimal edge integrators for a detailed description.
filter, which can be slow to compute in the spatial domain if the amount of smoothing required is important (the filter will have a large spatial support in that case). For this reason, it is often suggested to use Rachid Deriche's infinite impulse response
form of Canny's filter (the Canny-Deriche detector), which is recursive, and which can be computed in a short, fixed amount of time for any desired amount of smoothing. The second form is suitable for real time implementations in FPGAs or DSPs
, or very fast embedded PCs. In this context, however, the regular recursive implementation of the Canny operator does not give a good approximation of rotational symmetry and therefore gives a bias towards horizontal and vertical edges.
Edge detection
Edge detection is a fundamental tool in image processing and computer vision, particularly in the areas of feature detection and feature extraction, which aim at identifying points in a digital image at which the image brightness changes sharply or, more formally, has discontinuities...
operator was developed by John F. Canny in 1986 and uses a multi-stage algorithm
Algorithm
In mathematics and computer science, an algorithm is an effective method expressed as a finite list of well-defined instructions for calculating a function. Algorithms are used for calculation, data processing, and automated reasoning...
to detect a wide range of edges in images. Most importantly, Canny also produced a computational theory of edge detection explaining why the technique works.
Development of the Canny algorithm
Canny's aim was to discover the optimal edge detection algorithm. In this situation, an "optimal" edge detector means:- good detection – the algorithm should mark as many real edges in the image as possible.
- good localization – edges marked should be as close as possible to the edge in the real image.
- minimal response – a given edge in the image should only be marked once, and where possible, image noise should not create false edges.
To satisfy these requirements Canny used the calculus of variations
Calculus of variations
Calculus of variations is a field of mathematics that deals with extremizing functionals, as opposed to ordinary calculus which deals with functions. A functional is usually a mapping from a set of functions to the real numbers. Functionals are often formed as definite integrals involving unknown...
– a technique which finds the function
Function (mathematics)
In mathematics, a function associates one quantity, the argument of the function, also known as the input, with another quantity, the value of the function, also known as the output. A function assigns exactly one output to each input. The argument and the value may be real numbers, but they can...
which optimizes a given functional
Functional (mathematics)
In mathematics, and particularly in functional analysis, a functional is a map from a vector space into its underlying scalar field. In other words, it is a function that takes a vector as its input argument, and returns a scalar...
. The optimal function in Canny's detector is described by the sum of four exponential
Exponential function
In mathematics, the exponential function is the function ex, where e is the number such that the function ex is its own derivative. The exponential function is used to model a relationship in which a constant change in the independent variable gives the same proportional change In mathematics,...
terms, but can be approximated by the first derivative
Derivative
In calculus, a branch of mathematics, the derivative is a measure of how a function changes as its input changes. Loosely speaking, a derivative can be thought of as how much one quantity is changing in response to changes in some other quantity; for example, the derivative of the position of a...
of a Gaussian.
Noise reduction
Convolution
In mathematics and, in particular, functional analysis, convolution is a mathematical operation on two functions f and g, producing a third function that is typically viewed as a modified version of one of the original functions. Convolution is similar to cross-correlation...
with a Gaussian filter. The result is a slightly blurred
Gaussian blur
A Gaussian blur is the result of blurring an image by a Gaussian function. It is a widely used effect in graphics software, typically to reduce image noise and reduce detail...
version of the original which is not affected by a single noisy pixel to any significant degree.
Here is an example of a 5x5 Gaussian filter, used to create the image to the right, with
= 1.4:Finding the intensity gradient of the image
Edge detection
Edge detection is a fundamental tool in image processing and computer vision, particularly in the areas of feature detection and feature extraction, which aim at identifying points in a digital image at which the image brightness changes sharply or, more formally, has discontinuities...
(Roberts
Roberts Cross
The Roberts' Cross operator is used in image processing and computer vision for edge detection. It was one of the first edge detectors and was initially proposed by Lawrence Roberts in 1963...
, Prewitt
Prewitt
The Prewitt operator is used in image processing, particularly within edge detection algorithms. Technically, it is a discrete differentiation operator, computing an approximation of the gradient of the image intensity function. At each point in the image, the result of the Prewitt operator is...
, Sobel for example) returns a value for the first derivative in the horizontal direction (Gy) and the vertical direction (Gx). From this the edge gradient and direction can be determined:
The edge direction angle is rounded to one of four angles representing vertical, horizontal and the two diagonals (0, 45, 90 and 135 degrees for example).
Non-maximum suppression
- if the rounded gradient angle is zero degrees (i.e. the edge is in the north-south direction) the point will be considered to be on the edge if its gradient magnitude is greater than the magnitudes in the west and east directions,
- if the rounded gradient angle is 90 degrees (i.e. the edge is in the east-west direction) the point will be considered to be on the edge if its gradient magnitude is greater than the magnitudes in the north and south directions,
- if the rounded gradient angle is 135 degrees (i.e. the edge is in the north east-south west direction)the point will be considered to be on the edge if its gradient magnitude is greater than the magnitudes in the north west and south east directions,
- if the rounded gradient angle is 45 degrees (i.e. the edge is in the north west-south east direction)the point will be considered to be on the edge if its gradient magnitude is greater than the magnitudes in the north east and south west directions.
From this stage referred to as non-maximum suppression, a set of edge points, in the form of a binary image
Binary image
A binary image is a digital image that has only two possible values for each pixel. Typically the two colors used for a binary image are black and white though any two colors can be used. The color used for the object in the image is the foreground color while the rest of the image is the...
, is obtained. These are sometimes referred to as "thin edges".
Tracing edges through the image and hysteresis thresholding
Large intensity gradients are more likely to correspond to edges than small intensity gradients. It is in most cases impossible to specify a threshold at which a given intensity gradient switches from corresponding to an edge into not doing so. Therefore Canny uses thresholding with hysteresisHysteresis
Hysteresis is the dependence of a system not just on its current environment but also on its past. This dependence arises because the system can be in more than one internal state. To predict its future evolution, either its internal state or its history must be known. If a given input alternately...
.
Thresholding with hysteresis requires two thresholds – high and low. Making the assumption that important edges should be along continuous curves in the image allows us to follow a faint section of a given line and to discard a few noisy pixels that do not constitute a line but have produced large gradients. Therefore we begin by applying a high threshold. This marks out the edges we can be fairly sure are genuine. Starting from these, using the directional information derived earlier, edges can be traced through the image. While tracing an edge, we apply the lower threshold, allowing us to trace faint sections of edges as long as we find a starting point.
Once this process is complete we have a binary image where each pixel is marked as either an edge pixel or a non-edge pixel. From complementary output from the edge tracing step, the binary edge map obtained in this way can also be treated as a set of edge curves, which after further processing can be represented as polygons in the image domain.
Differential geometric formulation of the Canny edge detector
A more refined approach to obtain edges with sub-pixel accuracy is by using the approach of differential edge detection, where the requirement of non-maximum suppression is formulated in terms of second- and third-order derivatives computed from a scale-space representation (Lindeberg 1998) – see the article on edge detection for a detailed description.Variational-geometric formulation of the Haralick-Canny edge detector
A variational explanation for the main ingredient of the Canny edge detector, that is,finding the zero crossings of the 2nd derivative along the gradient direction, was shown
to be the result of minimizing a Kronrod-Minkowski functional while maximizing the integral
over the alignment of the edge with the gradient field (Kimmel and Bruckstein 2003). See article on
regularized Laplacian zero crossings and other optimal edge integrators for a detailed description.
Parameters
The Canny algorithm contains a number of adjustable parameters, which can affect the computation time and effectiveness of the algorithm.- The size of the Gaussian filter: the smoothing filter used in the first stage directly affects the results of the Canny algorithm. Smaller filters cause less blurring, and allow detection of small, sharp lines. A larger filter causes more blurring, smearing out the value of a given pixel over a larger area of the image. Larger blurring radii are more useful for detecting larger, smoother edges – for instance, the edge of a rainbow.
- Thresholds: the use of two thresholds with hysteresis allows more flexibility than in a single-threshold approach, but general problems of thresholding approaches still apply. A threshold set too high can miss important information. On the other hand, a threshold set too low will falsely identify irrelevant information (such as noise) as important. It is difficult to give a generic threshold that works well on all images. No tried and tested approach to this problem yet exists.
Conclusion
The Canny algorithm is adaptable to various environments. Its parameters allow it to be tailored to recognition of edges of differing characteristics depending on the particular requirements of a given implementation. In Canny's original paper, the derivation of the optimal filter led to a Finite Impulse ResponseFinite impulse response
A finite impulse response filter is a type of a signal processing filter whose impulse response is of finite duration, because it settles to zero in finite time. This is in contrast to infinite impulse response filters, which have internal feedback and may continue to respond indefinitely...
filter, which can be slow to compute in the spatial domain if the amount of smoothing required is important (the filter will have a large spatial support in that case). For this reason, it is often suggested to use Rachid Deriche's infinite impulse response
Infinite impulse response
Infinite impulse response is a property of signal processing systems. Systems with this property are known as IIR systems or, when dealing with filter systems, as IIR filters. IIR systems have an impulse response function that is non-zero over an infinite length of time...
form of Canny's filter (the Canny-Deriche detector), which is recursive, and which can be computed in a short, fixed amount of time for any desired amount of smoothing. The second form is suitable for real time implementations in FPGAs or DSPs
Digital signal processor
A digital signal processor is a specialized microprocessor with an architecture optimized for the fast operational needs of digital signal processing.-Typical characteristics:...
, or very fast embedded PCs. In this context, however, the regular recursive implementation of the Canny operator does not give a good approximation of rotational symmetry and therefore gives a bias towards horizontal and vertical edges.
See also
- Feature detection (computer vision)
- Feature extractionFeature extractionIn pattern recognition and in image processing, feature extraction is a special form of dimensionality reduction.When the input data to an algorithm is too large to be processed and it is suspected to be notoriously redundant then the input data will be transformed into a reduced representation...
- Scale spaceScale spaceScale-space theory is a framework for multi-scale signal representation developed by the computer vision, image processing and signal processing communities with complementary motivations from physics and biological vision...
- Ridge detectionRidge detectionThe ridges of a smooth function of two variables is a set of curves whose points are, in one or more ways to be made precise below, local maxima of the function in at least one dimension. For a function of N variables, its ridges are a set of curves whose points are local maxima in N-1 dimensions...
- Computer visionComputer visionComputer vision is a field that includes methods for acquiring, processing, analysing, and understanding images and, in general, high-dimensional data from the real world in order to produce numerical or symbolic information, e.g., in the forms of decisions...
- Digital image processingDigital image processingDigital image processing is the use of computer algorithms to perform image processing on digital images. As a subcategory or field of digital signal processing, digital image processing has many advantages over analog image processing...
Suggestions
- Canny, J., A Computational Approach To Edge Detection, IEEE Trans. Pattern Analysis and Machine Intelligence, 8(6):679–698, 1986.
- R. Deriche, Using Canny's criteria to derive a recursively implemented optimal edge detector, Int. J. Computer Vision, Vol. 1, pp. 167–187, April 1987.
- Lindeberg, Tony "Edge detection and ridge detection with automatic scale selection", International Journal of Computer Vision, 30, 2, pp 117—154, 1998. (Includes the differential approach to non-maximum suppression.)
- Kimmel, Ron and Bruckstein, Alfred M. "On regularized Laplacian zero crossings and other optimal edge integrators", International Journal of Computer Vision, 53(3):225-243, 2003. (Includes the geometric variational interpretation for the Haralick-Canny edge detector.)